For many centuries, canal boats were propelled by men, horses or mules on the towpath beside the water. Before diesel power took over, engineers developed several interesting methods powered by electricity: trolleyboats, floating funiculars and electric mules.
Many of these ecological solutions could be applied today instead of diesel engines. Because of the very low energy requirements, they could easily be powered by renewable energy, generated on the spot by water turbines located at sluices. One trolleyboat line is still in use.
Most of these systems were at least four times more efficient than diesel powered barges
As described in a previous article, trolleybuses and trolleytrucks would make a lot of sense these days because they could deliver electric transport for a bargain, using simple and existing technology.
The same method was once applied to boats, too. Not for sea travel, of course, but for canal transport. Some canal boats were also propelled by systems that resemble those of cable trains, and yet another method combined common railway technology with canal barges.
All this happened at the turn of the twentieth century, mainly in France and to a lesser extent in Germany, in Belgium and (only experimentally) in the United States.
Up until the second half of the nineteenth century, canal barges were the main means of transporting goods over longer distances through regions where no good natural waterways existed. In all of Europe by the end of the 1800s, there were between 19,300 and 24,000 kilometres (12,000 and 15,000 miles) of canals. In the US in 1880, the total length of canals was around 7,200 kilometres (4,500 miles).
Mules and horses
From the 1840s onwards the rapid progress of railways threatened to make these canal networks obsolete. In 1880, already 3,200 km (2,000 miles) of canals in the US had fallen into disuse because of the rise of the railroads.
Canal boats, which had a capacity of up to 240 tons in the second half of the 19th century, were towed by horses or mules on the tow path (sails were not an option on most canals).
This method was very efficient compared to non-motorised land-based transport; a horse could carry 10 times more cargo in this way than was possible when hauling a cart on the road. Compared to the new railways, however, the cargo capacity of animal powered barges was limited and the speed was low.

In most countries, animal traction remained the only method in use on the canals, until it was superseded by diesel engines in the 1930s or later, or until the canals fell into disrepair altogether (like in the United Kingdom). But, faced with the decline in traffic at the end of the 1800s, some governments and canal companies attracted engineers to look for more modern and efficient ways of boat propulsion to compete with the railways.
Steam barges
The obvious solution to canal barge transport was the steam engine - the same technology that kept trains going. Some canal barges were indeed converted to independent steam powered vehicles or towboats, but it soon became clear that this could not work when applied to large numbers of boats.
The reason was the state of the canals. In those times, canals were simply a large ditch without reinforced banks. If all barges would be equipped with steam engines onboard, or towed by steam boats, then the wash of the screws (or paddlewheels) would have destroyed the banks of the canals in no time.
Another obstacle was the limited depth of most canals, not exceeding 2 to 2.5 metres (6.5 to 8.5 feet) and this only in the middle of the canal. This made higher speeds problematic, because the stern of a propeller powered boat comes to lay deeper in the water as speed goes up.
A third problem of steam power was that the bulky engine took away cargo space, thereby lowering the efficiency of the transport system. This made that, even though steam boats already existed since the end of the 1700s, and many of them were in use on rivers and lakes, only 84 of them were operated on American canals in 1906.
Batteries
Because of these challenges, another obvious method - electric boats powered by batteries - was no solution either. At the end of the 19th century, thousands of electric automobiles were in use on the streets.
The first “automobile” or independent boat carrying its own battery was already demonstrated in 1838, and at the end of the 1870s one even made a trip across the English Channel. But, these boats were not suited for canal transportation. The propeller or paddlewheel would create the same wash as a steamboat, destroying the delicate canal banks. The batteries would take up almost all the cargo space.
Overview of electrical methods
Ultimately, engineers found the solution in electric propulsion without the use of batteries. Roughly, all methods can be divided in five classes:
- Trolley propeller towing - engine on the boat.
- Trolley submerged chain towing - engine on the boat.
- Funiculars - engine on the banks.
- Manned electric mules - engine on the banks.
- Unmanned electric mules - engine on the banks or over the water.
Most of these systems were initially powered by steam engines, and later adapted to electricity, which made them much more efficient and practical. Some systems were afterwards converted to diesel engines. With the exception of funicular boats, all electrical systems were fed by a trolley line.
Apart from some regional success stories, none of these technologies found widespread use, in spite of the many successful tests. Peak oil and global warming were no concerns in those times. Most countries chose to further deepen out and reinforce their canals in order to allow self-propelled steam and, a bit later, diesel boats.
At the end of the article I will explain why it is time to ditch these and finally give the trolley systems the attention they deserve; they are our best chance to develop a completely oil independent, land-based cargo transport network with a large capacity.
1. Trolley propeller systems
One of the first alternatives for animal power was the trolley propeller system. Only four years after the first experimental trolleybus, Frank W. Hawley adapted an ordinary steam canal boat to a trolleyboat (named after him), which was tested on the Erie Canal in the US in 1893.
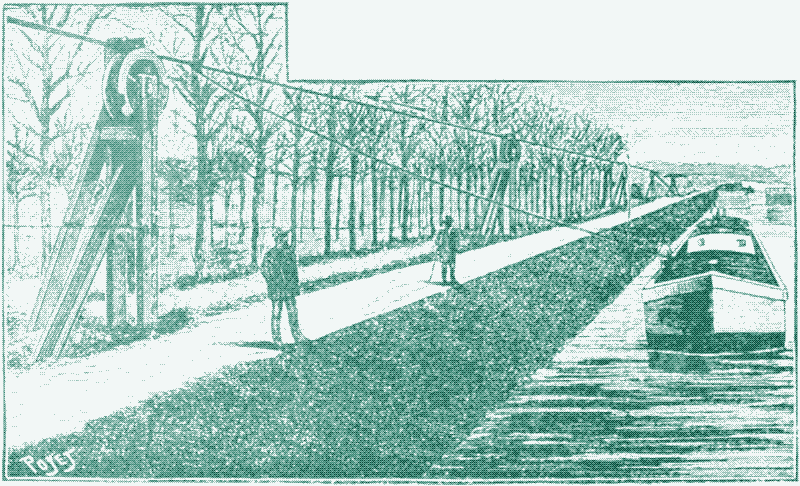
The two electric motors (of 25 HP each) powered two screw propellers and received current from a pair of wires suspended over the canal through two ordinary underbearing trolley poles (picture on the right).
As the boat had more or less lateral movement, the contact arrangement had to be flexible, and as the canal could not be used as a return, a double metallic circuit had to be used. This necessitated two wires for boats going in each direction.
Wash
The trolleyboat turned out to be a better option than the battery powered electric boat, because the cargo space was mainly left intact - electric motors were smaller than steam engines and no batteries were needed. Moreover, the range of the boat was unlimited.
However, as with battery powered electrical boats and steam barges, the propeller created a wash and thus posed similar problems to the canal banks. The only way around this was to lower the speed, which made trolleyboats not that attractive.
Trolley ferry
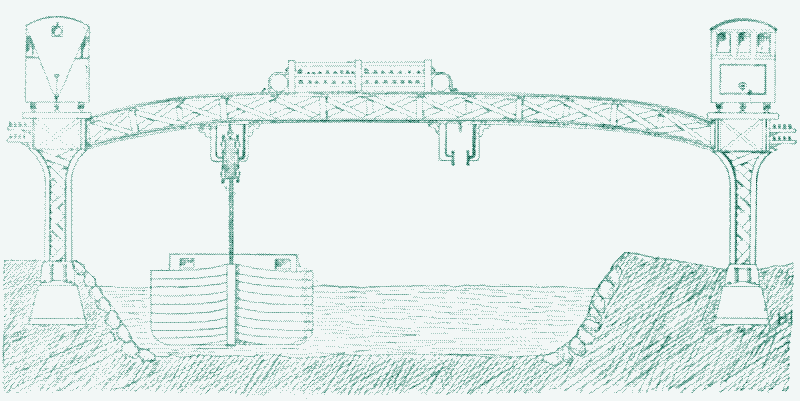
The trolley system was never installed on the Erie canal, and neither were other electrical propulsion systems, because eventually the canal - 566 kilometres (352 miles) long and the most important in the US - was deepened out and reinforced in 1918 to allow the use of self-propelled boats. A plan for a trolley powered ferry did not make it either (illustration below).
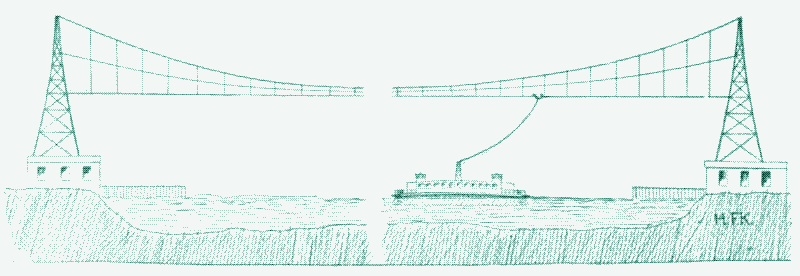
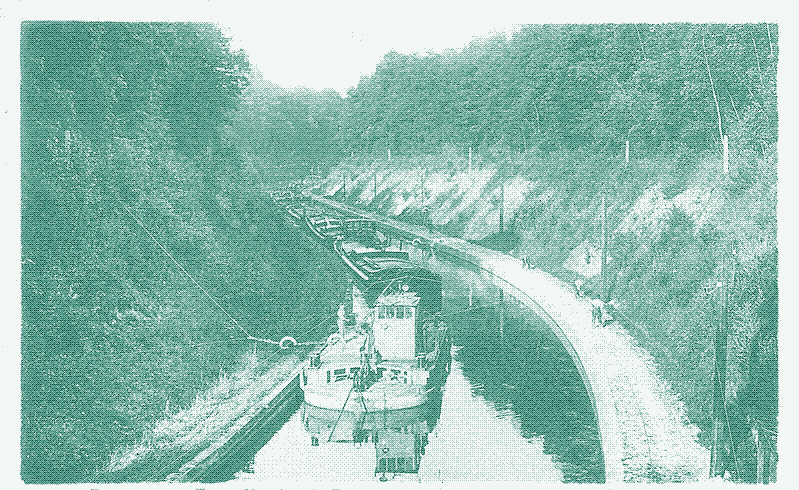
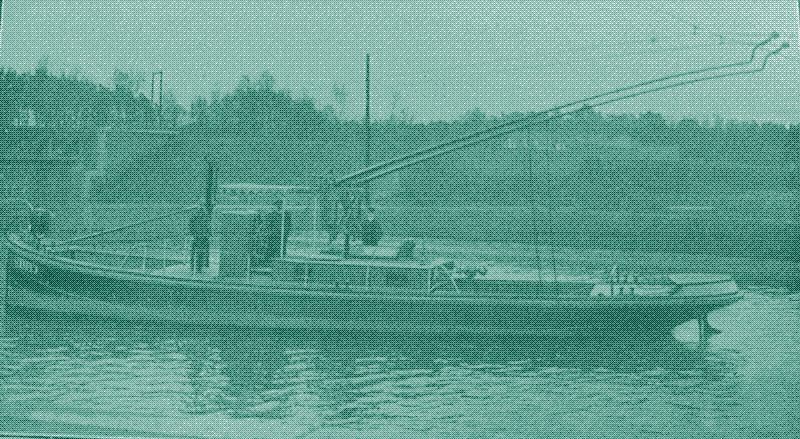
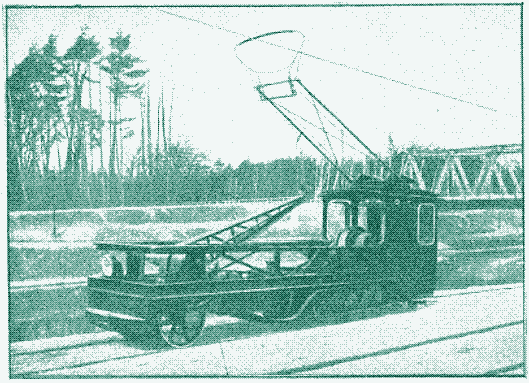
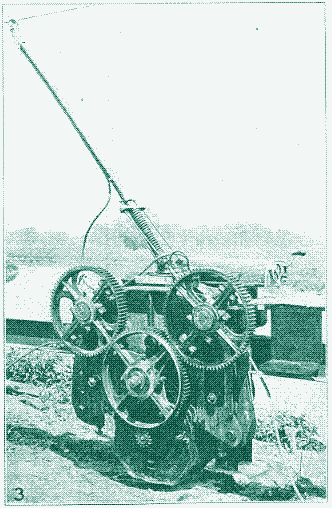
In 1903, the Germans experimented with a propeller powered trolleyboat on the Teltow canal (first picture above). It was a very sophisticated machine, creating almost no wash because of a special arrangement of three propellers, but eventually the electric mule (see further) was preferred.
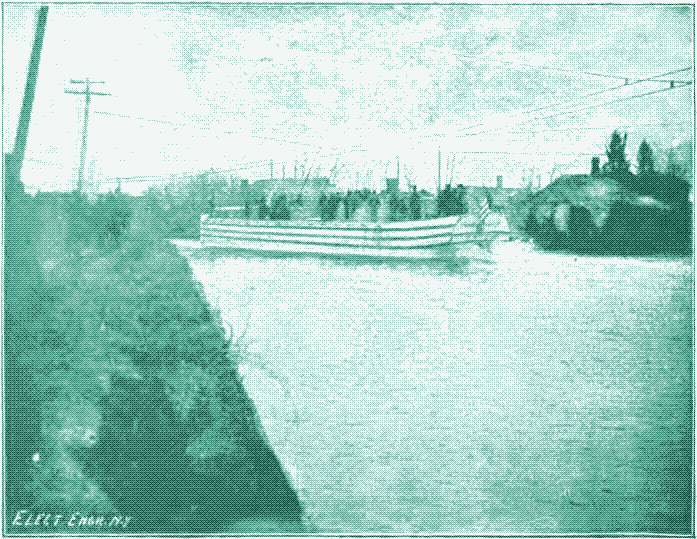
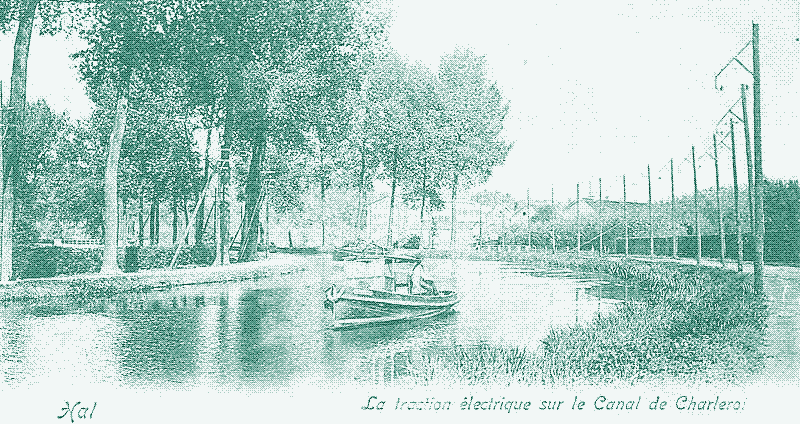
Below is a picture of what seems to be the only propeller powered trolleyboat line that was ever operated in a commercial way. It was installed along a 4 kilometre (2.5 miles) stretch of the Charleroi Canal in Belgium in 1899. The trolleyboats towed unpowered canal barges. The line formed part of a 47 kilometre (29 miles) long trajectory served by electric mules (see further) and was only operated for a couple of years.
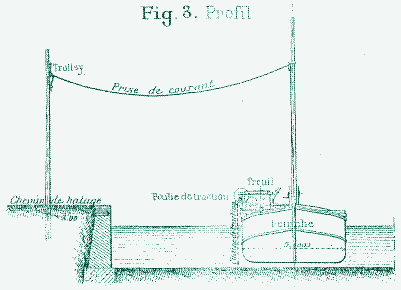
2. Trolley submerged cable or chain towing
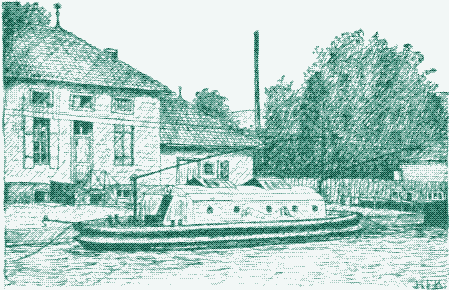
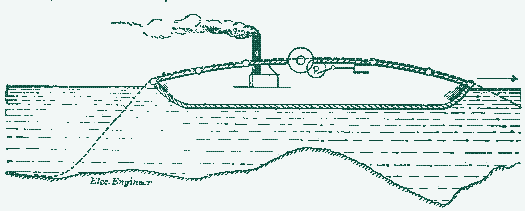
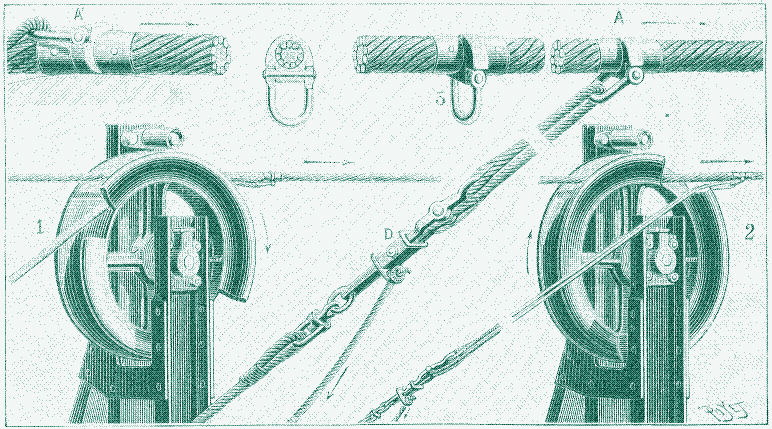
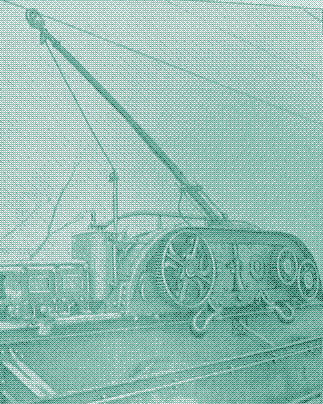
In Germany, France and Belgium, another system was en vogue: chain towing. Initially steam engines were used (see illustration on the right and picture below), but some of these were later replaced by electric motors, combined with a trolley system.
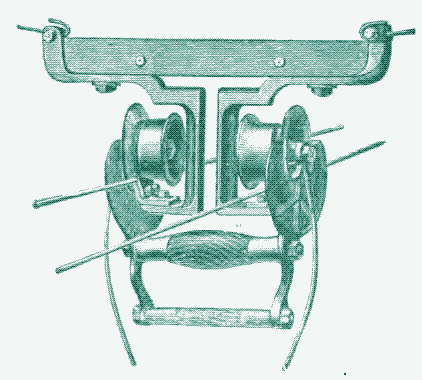
This method (first put into practice by french engineer François Galliot) combined the trolley system described above with an alternative means of boat propulsion: a cable or chain laid at the bottom of the canal. It was lifted and passed over rollers or wheels on the boat, which firmly gripped the chain or cable. These rollers were rotated by a motor on the boat (on top or on the side) and as they revolved they pulled the boat along the waterway on the cable.
The general arrangement was very much the same as in the trolley propeller method, but instead of turning a propeller, the motor would revolve the hauling drums or machinery. An important advantage was that the system did not create a wash and was thus compatible with the shallow and delicate canals.
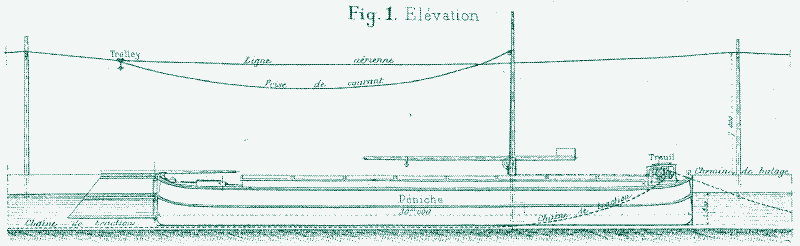
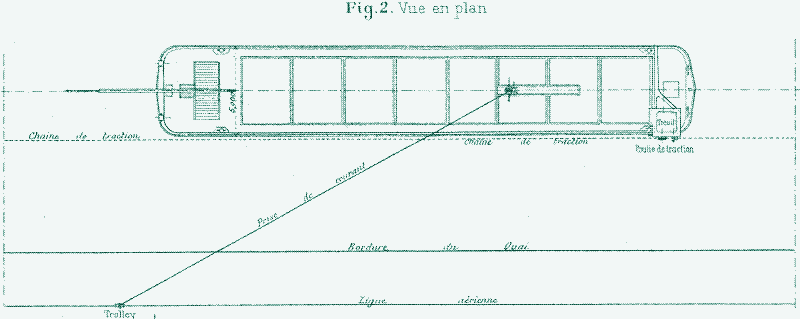
Another advantage was that, instead of having a double contact wire and double contact trolley carriage, the cable could be used as the return conductor. As this would necessitate only one contact wire, the contact arrangement and switching devices would be simpler and thus cheaper.
Bourgogne canal
Steam powered cable haulers were already operated at the end of the 1860s, mostly on rivers. Two of these navigated on a 125 km (78 miles) stretch of the Erie Canal in the US from 1873 to 1880, but they were said to interfere so much with other traffic that their use was discontinued.

Towards the end of 1893 (the same year that a propeller powered trolleyboat was tested on the Erie Canal), the first electrically powered submerged flexible cable system was set up in the Bourgogne canal in France. The hauling machinery was operated by an electric motor on the boat, which received current from an overhead trolley circuit (see picture above). Operation started in 1894 and the line remained in service for more than 20 years.
Tunnels
The 6 kilometre (3.7 miles) long track went through a 3.3 kilometre (2 miles) long tunnel (in “Pouilly-en-Auxois”) and replaced a steam powered cable hauler that was in use since 1867. That this electric system (and others, see further below) served to pass through tunnel was no coincidence.
Most of the underground canals going through mountains and hillsides were too narrow for a towpath. This meant that the horses were led over the mountain while the boat was moved through the tunnel by human power.
This happened by means of men lying on boards across the top of the boats, literally “walking” on the ceiling and so “legging” the boat through the tunnel. These men could be the bargemen themselves, or people who offered this service to them (the “leggers”).
Of course, this method was painstakingly slow, and thus these tunnels were the first to be equipped with submerged cable steam towers. However, because of the exhaust fumes, this propulsion method was not really compatible with the small space and so they were converted to electricity when this became technically feasible.
Zero emissions
The installation at the Bourgogne canal gave great satisfaction and it was the first electrical boat propulsion system to be operated on a practical, commercial basis. Moreover, it was a zero-emissions transport system: the electricity was generated on both sides of the track by means of turbines placed at the cascades of two successive locks, having a fall of 7.5 metres (24.5 feet). Apart from the ecological advantage, the use of renewable electricity made that the line was working at almost no cost.
Only trolleyline still in use
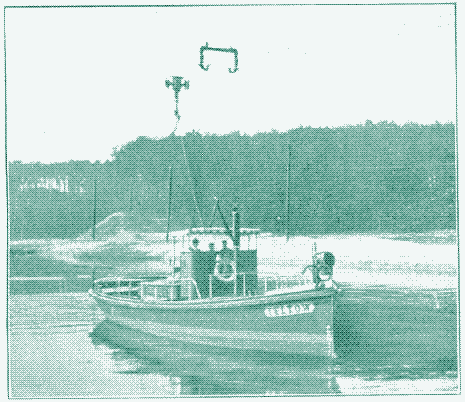
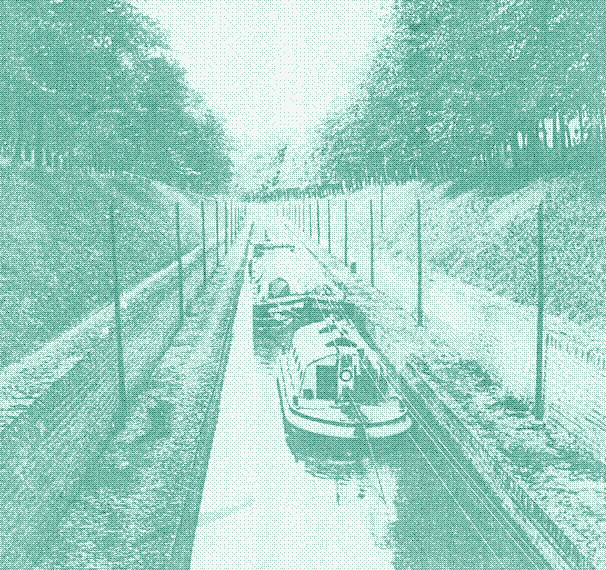
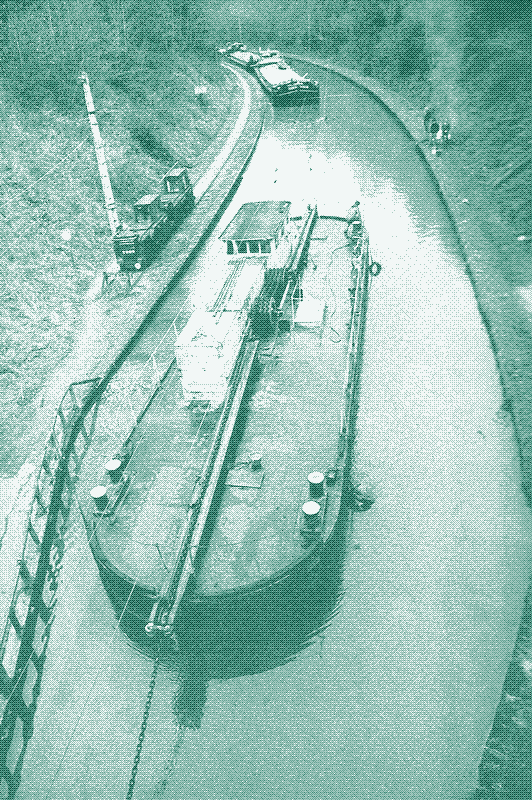
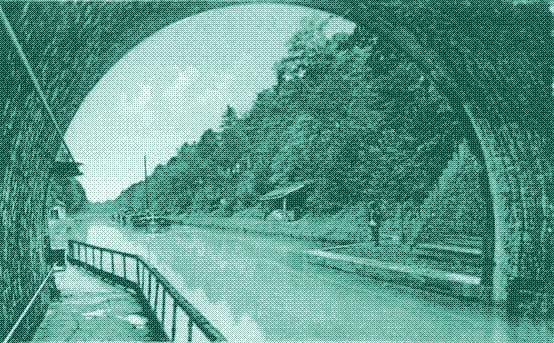
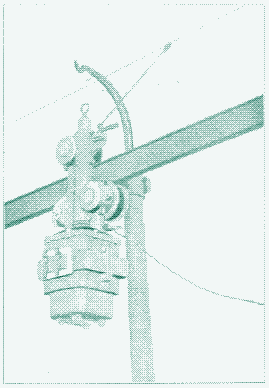
Much later, in 1933, another line was set up on the “canal de la Marne au Rhin”. This system is still in use today (pictures below) and replaced a funicular system (see further below). Also in this case, the trolley line was used to cross a subterranean tunnel, this one (“tunnel de Mauvages”) being almost 5 kilometres (3.1 miles) long.
In 1936, the trolleyboat line was combined with electric mules (see further below) that operated alongside the whole canal except for the tunnel itself (where there is no towpath). The system is still working today because the fumes of diesel powered barges (which have replaced the electric mules along the rest of the canal) would suffocate the bargemen in the long tunnel.

The method had some disadvantages, which prevented it from being used on a larger scale. The first was the difficulty in rounding curves. As the chain or cable was laying loosely at the bottom, it frequently came very close to the banks, so the boats could run into the banks and sustain damage.
Secondly, if there were many locks along the canal, this necessitated the picking up and dropping of the cable a great number of times which caused considerable difficulty and loss of time. Therefore, submerged cable towing was mostly limited to straight stretches of canal without too many sluices.
3. Cable towing (funiculars)
French engineer Maurice Lévy was inspired by funiculars instead of trolleybuses. In 1888, he conducted a number of experiments with cable hauling in the neighbourhood of Paris, at the junction of the Saint Maur and Saint Maurice Canals. This point was especially selected because the canals meet at right angles and hence present peculiar difficulties in turning the boats.
Contrary to the two systems described above, there was no motor or engine placed on the boat itself. The boats were propelled by a moving cable on each bank, carried on supports provided with pulleys, and operated parallel to the canal. The cable was moved by a fixed motor, also placed on the banks of the river, and the boats were attached to the cable by means of hauling ropes. The technology was also used for aerial ropeways and wire rope power transmission.
Protruding from the boat were suitable arms, to which devices were attached that were adapted to grip and hold the moving cable. The boat could be started or stopped by connecting or disconnecting the grip with the cable by suitable devices on the boat. The system allowed for a speed of 4 kilometres per hour (2.5 miles per hour).
The cable was installed a few yards from the edge, in order to leave the tow path free. The method was thus easy to combine with horse and mule powered canal boats (contrary to the methods described below). The pulleys (shown on the smaller images above and below) were placed vertically on a straight line, and more or less inclined on curves.

The cable was provided with links to which the rope was affixed that hauls the boat along (see engraving below). These links, fixed between rings, were capable of revolving freely upon the cable so as to avoid troubles from the latter’s tension. In order to prevent the cable from jumping out of the pulley channels, it was kept in place by a small overriding roller, and the flanges of the pulleys were notched, so as to allow the hauling links to go by.
At its starting point, the cable passed over three large pulleys, actuated by the steam engine, which is placed in a small power house on the edge of the canal (see the above illustration). To the right, there was a fourth pulley carried by a small car fitted with a counterpoise which served to keep the cable uniformly taut.
Cable towing had some interesting advantages over the previous method. Just as with submerged chain towing, no wash was created. Furthermore, there was no need to place an engine onboard, which meant that no cargo space was sacrificed, and that existing barges could be used without any further adaptations, or without the use of a towboat. Moreover, taking turns and passing sluices went much smoother than with the submerged chain method described above.
Applications
In spite of obvious advantages, the experimental line was dismantled some years later (as happened with a similar experiment in Germany) and Lévy installed his only commercial system on the Aisne-Marne Canal, towing the barges through the 2.6 kilometre (1.6 miles) long Mont-de-Billy tunnel. It remained in use until the 1940s (picture below).
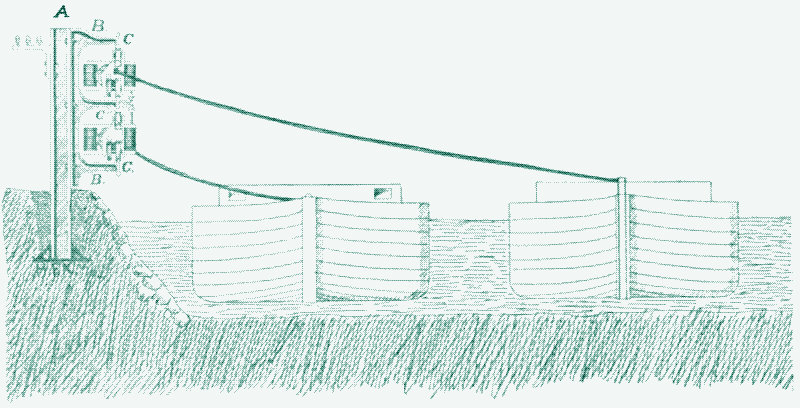
The problem was that the Frenchman used steam engines to move the cable - in that time, he did not have much choice. Every cable would be operated in lengths of about 8 kilometres (5 miles) each way from the power station, the outgoing cable being used for boats going in one direction and the return cable (after crossing the canal) for those going in the other way (see illustration below). Arriving at the end of each circuit, the boats would be disconnected from the cable, connected to the cable of the next circuit, and so on. This meant that each circuit would have required its own steam engine, and personnel to operate it, and this would have been prohibitively expensive.
Electrical funiculars
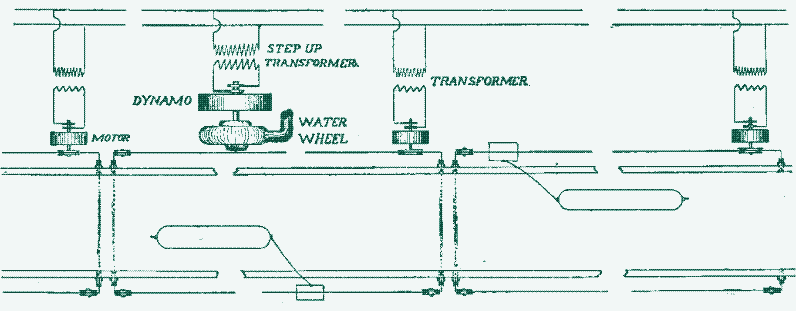
Maurice Lévy was ahead of his time, because 10 years later the technology for electricity generation had much improved. The Americans designed a similar plan but using electrical generators, fed by a cheap source of power such as a waterfall at a sluice. In this case, not every circuit required its own generator, because the electricity could be transported (see illustration below). Unfortunately, as mentioned earlier, the US eventually chose to deepen and reinforce the canals to give way to self-propelled boats, and the plans were never realised.
Only one electrically powered funicular system was effectively built and operated, on two separate parts of the “Canal de la Marne au Rhin”. It was successfully tested in 1910 in Jarville, close to Nancy, and fully installed just before the start of the First World War, by another French engineer, Edouard Imbeaux. It replaced a submerged cable steam towboat (described above).
One line was 7 kilometres or 4.3 miles long (passing through the 5 km or 3.1 miles long “tunnel de Mauvages”), the other line was 5 kilometres long (going through the “souterrain de Foug”). The speed of the cable could be adjusted in order to pass the sluices. The lines were operated until 1933, when they were replaced by the only trolley barge system still in use today (described above).
4. Motor locomotive haulage (electric mules)
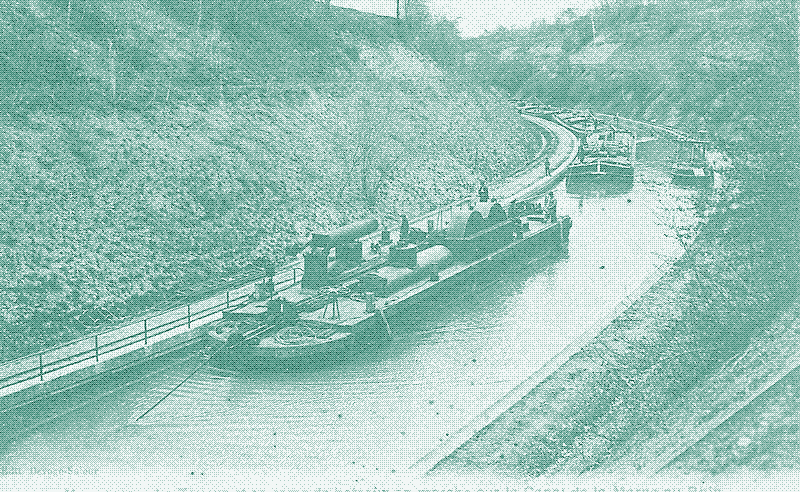
The only method that found a widespread use, at least on a regional scale, adhered to the old and primitive method of haulage or towing by mules on the path next to the canal. But, for the slow and uneconomical animal, a more efficient mechanical mule was substituted, hooked up to a trolleyline. The machines were either run upon a track on the banks of the canal - this method being practically a railway along the banks, the boats being trailers connected by a 50 metre (165 feet) long tow line to the motor cars (illustration below) - or either run upon the towpath itself - this method somewhat resembling a land-based trolleytruck convoy (picture above).
As with the animal powered systems, two persons were needed to operate the convoy: one on the banks (driving the locomotive or truck) and one on the boat (steering). Using this method none of the boats were equipped with a motor, which resulted in the same advantages as with the funicular system: any boat previously towed by mules or horses could be hauled in this way without any adaptations or the need for a specially designed towboat, and no wash was created, leaving the delicate canal banks untouched and eliminating the need for deeper waterways.
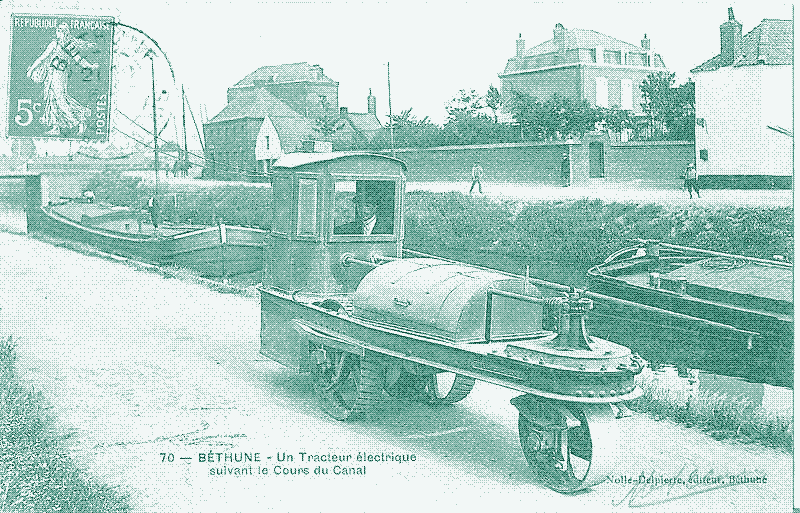
In France, after some years of unsuccessful experiments with common steam locomotives on the tow path (starting in 1873), the first “electric horse” was tested in 1895 by M. Galliot on the Bourgogne Canal. The vehicle was a small, three-wheeled trolleytruck (see the first picture). It drove on the tow path on metallic wheels (without the use of rails) and could haul a barge at a speed of 2.5 to 3 kilometres an hour (1.5 to 1.9 mph). This velocity was not much higher than that of an animal hauled barge, but the electric horse could tow considerably more weight.
The following year, the “Société de Halage Electrique” set up the technology on a 43 kilometres long stretch of the “Canal de la Deûle” and the “Canal d’Aire”, from Béthune to Douai (close to the city of Lille in Northern France, on the border with Belgium). After some initial difficulties, a year-round regular service was established from 1898 on. The track was soon lengthened to 55 kilometres (34 miles), including the “Canal de la Dérivation de la Scarpe”, all the way to Courchelettes. In 1900, around 120 of these engines were in use.
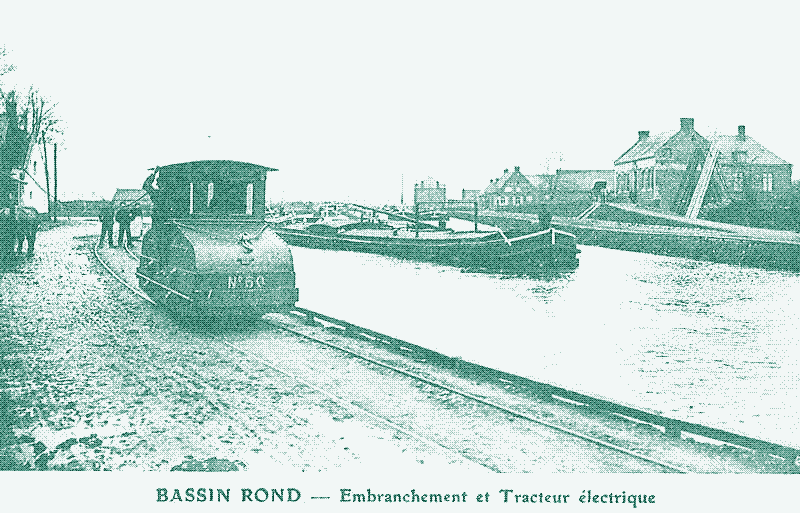
However, the metallic wheels had a detrimental effect on the tow path, and the maintenance costs shot up. The service was discontinued in 1904 and replaced by tractors on rails (picture above). Experiments with this technology had been conducted in 1902 on a one kilometre (0.6 miles) stretch of the “Canal de la Sensée” (connecting Courchelettes with the river l’Escaut).

These tractors, devised by M. Chanay, were twice as powerful as the trolleytrucks (boasting 40 HP and weighing 6 tons) and could tow 3 to 4 barges at a speed of 3 kilometres an hour (1.9 mph). In 1904, the rail-based system was installed along the 28 kilometre (17 miles) long “Canal de la Sensée” and along the busiest parts of the 55 kilometres (34 miles) of canal previously serviced by the trolleytrucks.
In 1907, around 30 tricycles (without rails) and 60 tractors on rails were operated on this 83 kilometre (51 miles) long trajectory, and a total of 3,408,764 tons of goods was transported (around 20,000 barge transports).
3,731 kilometres or 2,318 miles
The network was gradually enlarged (maps here- scroll to the right -, here and here) and mechanical mules became a common sight on almost every canal in Northern and Eastern France.
In 1940, they were used on 2,986 kilometres (1,855 miles) of canals. At its height, in 1958, the network was 3,731 kilometres (2,318 miles) long, of which 1,047 km (650 miles) on rails (using 1,700 tractors) and 2,684 km (1,667 miles) on tyres (using 770 tractors, mostly diesel powered by then - trolleytrucks were considered obsolete). Mechanical mules were operated until 1973.
Animal power abolished
Electric mules on rails turned out to be much more reliable on the towpath than trolleytrucks, being operational every day and both day and night. The trolleytruck system only worked during daylight (at night too many drivers would end up in the water) and it could not be operated in winter conditions. The use and maintenance of the track system was two times cheaper than the trolleytruck system, but because of the higher capital costs a trolleytruck system remained a better choice on sections where traffic was low.
Compared to mule traction, both mechanical systems were more reliable, cheaper and faster - crossing the “Canal de la Sensée” took one day compared to 3 to 4 days with mules. Still, horse and mule traction continued to coexist with mechanical traction (and self-propelled boats) until 1940, when it was abolished on most canals. The slower animals became too much of a nuisance for the mechanical tractors, even if they worked on the other bank of the canal. From that year on, only mechanical means were allowed to tow barges.
Belgium
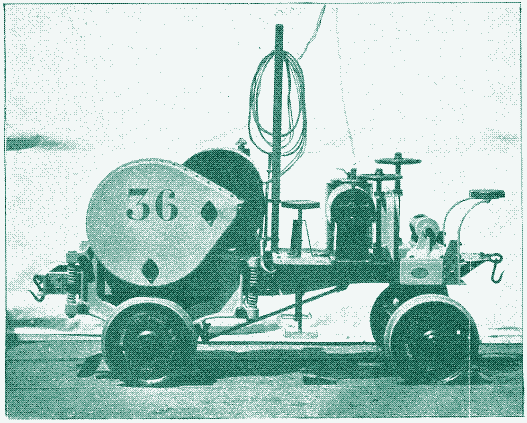
Electric mules were also used in other countries, be it on a much smaller scale. The first electric mules were operated not in France but in Belgium. In 1901, a 16 kilometre (9.9 miles) stretch of the canal between Brussels and Charleroi was equipped with electric mules (both on rails and on tyres) by Léon Gérard (picture on the right). This was later extended to 47 km (29 miles). As mentioned above, a short part of this line was (for some years) served by trolley towboats instead of electric mules.
Germany
The Germans started their experiments with common steam locomotives on the “Finow Canal” in 1890. The results were spectacular, these machines being able to tow 7 barges at a speed of 7 kilometres per hour (4.3 mph) without any noticeable wash created. However, the energy consumption was very high, which made the system uneconomical.
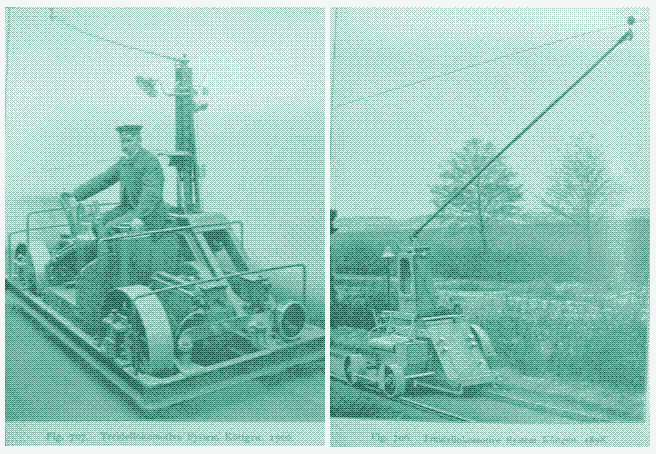
In 1899, they tested an electric tractor on rails designed by M. Kottgen, an engineer of Siemens. It differed from the electric mules used by the French and the Belgians, using only one rail. On the side of the canal, these vehicles did not rest on a rail but on two much larger iron wheels (pictures above).
These large wheels were aimed to assure the stability of the tractor, but they had the disadvantage that they quickly caused deep grooves in the tow path. While initially developed to save costs in laying tracks, maintenance costs soared and the method was abandoned.
1903, the Germans installed a mechanical traction method similar to that of the French on a 1.3 kilometre (0.8 miles) stretch of the “Teltow Canal”, close to Berlin. In 1905 and 1906, the transport network was extended to 70 kilometres (43 miles) using 22 vehicles. It remained in service until 1945, when it was dismantled by the Soviets.
The German vehicles were more sophisticated than those of the French. They were equipped with a system that regulated the speed of the boat while the speed of the tractor remained the same, by mechanically adjusting the length of the tow cable. In France, tractors started slowly and gradually increased their speed in order not to get pulled into the water by the barge.
Another electric mule system worth mentioning, technically similar but used for different purposes, is the one that is still being operated on the Panama Canal. In this case, the electric mules guide rather than tow the much larger ships (which keep using their engines).
In the US, electric mules were tested, but none of them were ever put in operation. One exception was a short and partial service on the Erie canal in Ohio in 1900, over a distance of 67 kilometres (42 miles). It was meant to be extended along the entire length of the canal from Toledo to Cincinnatti, a distance of about 393 kilometres (244 miles). But, the company quickly went bankrupt and the already existing tracks were dismantled.
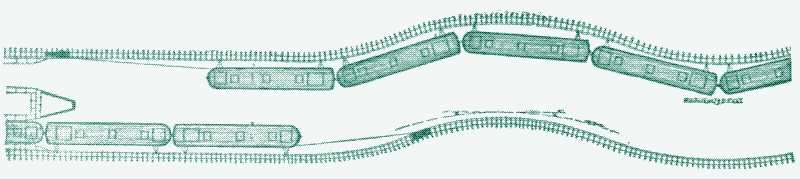
Two barges crossing
On the larger part of the canal trajectories in France, traction occurred only at one side of the canal. When two tractors going in opposite direction met, they switched barges and drove back to where they came from (one barge had to navigate over the sunken towline of the other).
A similar method had been in use with mules and horses for centuries. On the Teltow canal in Germany and, later, on some canals in France, tracks were laid on both side of the canal, which made towing easier but more expensive.
Loading and unloading
One disadvantage of electric mules was that they interfered with the loading and unloading of goods. But, as can be seen on the illustration above, this could be bypassed with an extra dock and two tracks (this design was actually built on the Teltow canal).

To prevent the tractors from being pulled into the water by the barges, they were made very heavy, sometimes by using reinforced concrete. Furthermore, the rail on the side of the canal was placed a few centimetres higher than the other one.
Automobiles
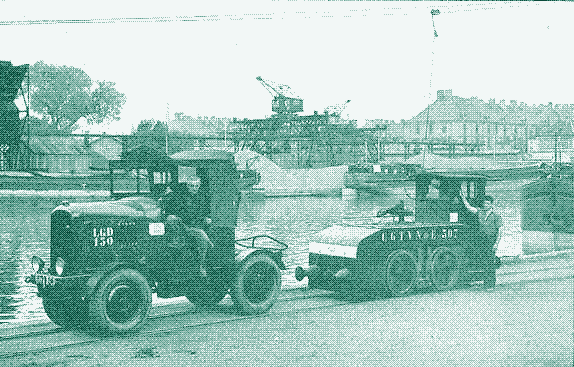
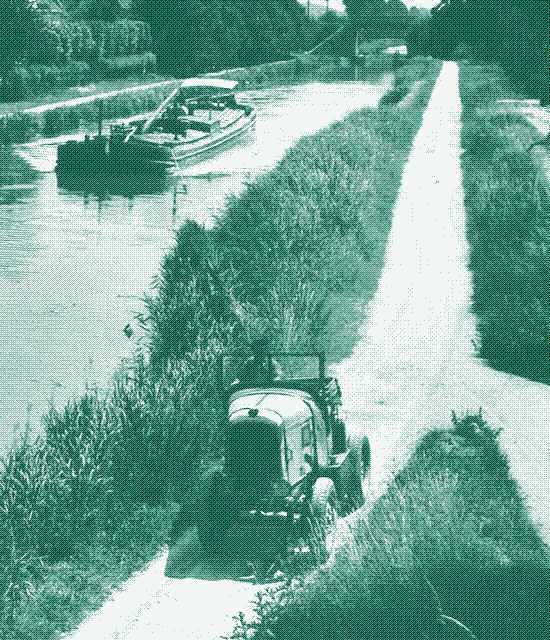
As time passed, many different kinds of vehicles were put into action. Diesel powered trucks slowly replaced trolleytrucks, and in France as well as in Belgium common automobiles were used also (picture below). After World War One, even tanks and other military vehicles were used to tow barges (picture above), without much success. Smaller companies kept using animals as part of a mix of materials.
5. Unmanned electric mules
A final method, mainly researched by the Americans but eventually only applied in France, blended all of the previously described methods more or less together in what is probably the most bizarre of all systems. It consisted of an unmanned electric mule, operated from the barge, riding on a rigid rail or rack, or suspended in the air on a cable, parallel to the canal - either on the banks or over the water. The unmanned locomotives - to which the boats were attached by a tow line and an electric line for control - received current from a trolley line.

Many different systems were designed and tested, of which the system invented by Richard Lamb became the best known (picture above). In 1896, three years after the experiments with the Frank W. Hawley trolleyboat (described above), the Lamb system was tested on a 6 kilometre (3.7 miles) stretch of the Erie Canal (at Tonawanda) and on the Raritan Canal in New Jersey. The idea was to use cheap electricity generated by the Niagara waterfalls, but eventually nothing happened. In 1898, the Lamb system was tested on the Finow Canal in Germany, but the Germans decided in favour of electric mules.
Duplex structure
With the Lamb system, on approaching another boat coming from the opposite direction, motors were stopped, cables were disconnected, and boats exchanged cables (and thus motors) and proceeded.
Some other systems allowed for the passing of two barges without exchanging motors, even if the track was laid out only on one side of the canal.
In the system designed by Joseph Sachs (illustration below), for instance, a duplex structure was used on which the motors or haulers were run between the middle and upper end middle and lower rails.
A similar rack system designed by Wood was tested on a part of the Erie canal in 1903. The results were very positive: four loaded boats were hauled at a speed of 7.2 km/h (4.5 mph), compared to 2.8 km/h (1.75 mph) for a mule towing one barge, and this without threatening the banks.
While the members of the commission before whom the experiments were conducted were satisfied with the success of the scheme, they decided to wait for the completion of the extension and deepening out of the canal network (the “Barge Canal”) before authorizing a permanent installation. But when this job was done, some decades later, diesel powered boats had become the norm.
Another test, using a system designed by Stillwell and Putnam, was performed on the Lehigh canal in Pasadena in 1907. The experiments were successful and the canal company was convinced of the feasibility of the technique. Unfortunately, they calculated that to justify the expenditure, the canal required 3 times as much cargo volume, and that never happened.
Debate
The Americans strongly believed that the unmanned mule was the best electrical system to propel canal boats, while the French and the Germans found the system to be rather problematic and were convinced that manned mules (their invention) were a much better option. They only saw limited use for unmanned mules, for instance in tunnels and in ports - an obvious advantage of most of these unmanned systems was that they kept the banks of the canal free.
This difference of opinions led to extensive comparisons in books and magazines, coming to opposite conclusions. Fact is, the Americans never put any electrical mules in practice, manned or unmanned, while the French used them both - the unmanned mules indeed only for specific uses.
Zinzins
The most spectacular application of unmanned mules was developed by the Frenchman Chéneau. The small 600 kilogram locomotives, suspended in the air on a cable, were known as “zinzins” and closely resembled the Lamb system. Parallel to the cable was trolleyline, which powered the motor.

The system was installed in the 1920s and was used to enter and leave sluices on a few canals in northern and eastern France. The towing of barges through sluices happened mainly by men, not by mules or horses, because it was a rather complicated task. Some “zinzins” remained in service until the arrival of self-propelled diesel boats.
The Americans made interesting plans, though, like the idea to suspend a rail upon which the motor runs, over the canal. This method would have had the advantage of affording a direct pull, but the cost of construction would be substantially higher than with the other systems. In the illustration below there is even a railway envisioned on top of the system.
Bring back the trolleyboats!
All the above is more than a gallery of obsolete technology. Canal transport is already one of the most energy-efficient ways to transport goods. For every litre of fuel burned, a barge can carry a tonne of cargo for 127 kilometres (79 miles), compared to 97 km (60 miles) for a train and 50 km (31 miles) for a truck (source). Electrifying canals could boost this efficiency even further, bringing the possibility of a zero-emission transport system within reach.

These days many canals have reinforced banks, so trolley systems with a propeller would no longer pose a problem. However, especially interesting are those systems in which traction happens on land instead of in the water (all systems excluding a propeller), because they are extremely energy-efficient.
To move a barge of a certain tonnage at low speeds, an electric mule (or any of the other systems described) needs an engine at least 4 times less powerful than when this engine would be placed on the boat itself, propelling a screw (source). Wheels are more efficient than propellers. This means that for every litre of fuel, a barge towed by a machine on the banks or via a chain on the bottom of the canal could carry a tonne of cargo for 500 kilometres (310 miles) - ten times more efficient than a truck or lorry.
Zero-emissions transport system
Because many canals have locks and thus artificial height differences between water surfaces, renewable energy could be generated on the spot. The required electricity to power the barges could also be generated by wind turbines or solar panels, which would make a zero-emissions transport system also possible in flat countries. Because of the very low energy requirements, the investment in renewable energy would be relatively small (contrary to, for instance, the plans to charge electric cars using solar panels). And as always, obsolete systems can be substantially improved with today’s technology and materials.
Low-tech canals
Of course, canal barges are much slower than trucks or trains. But, if they could haul cargo for almost nothing, it would still be an economical choice for many goods. This advantage would grow if oil prices would rise. Many abandoned canals could be put in use again, and even new ones could be built.
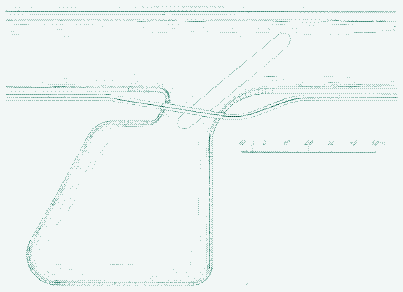
Almost all methods above were designed for use on very shallow, trapezoidal “low-tech” canals, which were only 2 metres (6.5 feet) deep at the centre, and much less on the sides (see picture below). These are not public works like the Panama Canal which would take decades and require thousands of workers (or energy-guzzling machines) to build. This is something that might even be done on a community level.
Sources (in chronological order):
- “Halage funiculaire”, La Nature, December 15, 1888
- “Gov. Flower’s trolley plan: he would equip the Erie Canal with electricity”, The New York Times, June 10, 1893
- “Electrical boats and navigation”, Martin Thomas Commerford, 1894 (this book has many more technical details on the methods used).
- “Electricity on the canals; another scheme for utilizing the trolley system”, The New York Times, January 21, 1894 (electric mules)
- “Traction mécanique des bateaux sur les canaux”, Mémoires et compte rendu des travaux de la Société des Ingenieurs Civils, January 18, 1895
- “Trolleyline for Canalboats: contract signed for an experimental system of four miles - how it would be operated”, The New York Times, July 26, 1895
- “Electricity on the Erie Canal”, The New York Times, September 28, 1895
- “The Canal Trolley works well: succesful test of the new system of propulsion”, The New York Times, October 27, 1895
- “Boats run by electricity, how the Lamb system has been found to work on the Erie”, The new York Times, November 24, 1895
- “Der Elektrische Schiffzug”, Georg Meyer, 1906
- “History of the canal system of the state of New York”, Nobel E. Whitford, 1906
- “Canals and other inland waters",US Census Bureau, 1907 or 1908 (pdf)
- “La traction électrique des bataux sur les canaux”, Mémoires et compte rendu des travaux de la Société des Ingenieurs Civils, November 1908 (lots of technical details here also, but in French).
- “Un neuvo systema de sirga funicular electrico para barcos”, M.Ed.Imbeaux, 1914 (pdf)
- “Le canal de Bourgogne et son traffic”, A. Desaunais, 1928
- “Electric mule could propel a canal boat system”, the US GenWeb project, July 29, 2004
- “The canals of England and Wales and their history”, Jeanette Brigss, 2008.
- “Traction mécanique sur les voies navigables”, G. de Frontenay (website - many pictures here)
- “Le tunnel de Mauvages”, bordabord.org (many pictures)
- “The Erie Canal” (website).
Reactions
To make a comment, please send an e-mail to solar (at) lowtechmagazine (dot) com. Your e-mail address is not used for other purposes, and will be deleted after the comment is published. If you don’t want your real name to be published, sign the e-mail with the name you want to appear.
Reactions
Jeffrey Geary
Trick is, where are there ready to use canals to even implement this?
Kris De Decker
Find more comments on the article over at The Oil Drum:
http://campfire.theoildrum.com/node/6103
Jef Jelten
Fantastic article. Thank you so much for your work.
I have been looking at this issue for some time and firmly believe canal and river transport will be an ever more important part of our future.
One Idea I had was a electric Stern wheeler pontoon boat. When batteries run low you anchor out of the channel but still in the current. the water flows between the pontoons, turns the paddlewheel, and the electric motors become generators charging the batteries. The pontoons can be wide and very flat bottom so this design would have large load carrying ability.
This is most practicle on rivers but if widely used no canals it could be engineered to run up stream with no current, then all would tie off and current resumed for so many hours to charge the fleet.
Just a thought.
peter leaback
I think the major stumbling block is the capital costs. The speed of transport is at least 1/10th that of road haulage. To transport goods at the same rate as one truck, you need 10 barges (of equal capacity). It would be difficult to achieve a construction cost of a powered barge at 1/10th that of a truck.
Mehul Kamdar
This is a very interesting article. I was with a company in Southern Illinois and whenever I drove to Calhoun County, I often had to drive along with my colleagues to St Louis and take the ferry across the Illinois or the Mississippi rivers depending upon which route we took. There were always a number of barges hauling cargo down to the Gulf for loading onto ocean freighters for shipment to other parts of the world. I do think that this system would be a very interesting way of powering barges up and downstream as speed does not matter when transporting corn in large quantities, for example, but cost does.
Sadly, the problem with Chinese “jumping” carp may not permit the canals connecting the Great Lakes to ever be opened in the future, though, or else, this would be an excellent system for transportation of goods between the US states and canadian provinces on the Great Lakes as well.
Andy Ballantyne
Information required on how to lift a barge from one level of lock to another. This canal would be far from any power supply.
Eric Wolfsbane
Of course, there’s still the problem of canals freezing over during the winter.
Stewart MacLennan
Congratulations on this story. We are presently moored beside one of these old engines, now just a paainted decoration at the port in Toul France. We and I am sure many others in this region have little idea of how wdespread the use of various types of power were to moving freight on the waterways before the engine and propeller phase of today started. As I say, well done.
Stewart MacLennan
Josh
I live where there used to be log drives (where rivers were basically used as sewers for transporting logs downstream - the similarity to sewers extends to holding back water in dams to flush the logs over obstructions). On relatively unobstructed rivers, the logs could be bound into rafts. Nowadays all those logs get moved by truck but I wonder if log rafts could have been improved by something like the electric mule.
If the “mule” could also operate as a generator dragged along by the raft, then timber floating downstream could generate power for boats going upstream or for the general electric grid. Since floating rafts would only generate power if they go slower than the current, it would only work for cargo that was not time sensitive, but that might be OK for some kinds of raw materials, if there was some way of reducing labor costs for assembling and steering the rafts.
Jiro
Very interesting topic. Thank you for the article. I found the nomenclature confusing. Continuity and consistency in terms would help.
kevin
“Zero emission’? Fat chance.
When are you going to realize, the electricity doesn’t come from thin air! It has to be produced somehow, & in the U.S. & PRC, in the main, it is produced by burning coal.
That’s hardly socially friendly, given the deaths of miners from digging it, let alone environmentally friendly, from the coal dust blowing off the train cars delivering it to the sulphur dioxide & acid rain & carbon dioxide from burning it.
Tell me again how it’s “zero emission”.
Josh
I suppose it is ironic that I am posting this as an idea for industrial logging after the article on coppicing came out, but it made me rethink my response from 6 years ago (November 13, 2014)
“Rafts” should probably be “bundles”. If the bundles have lots of drag (when perpendicular to the river’s flow), that is helpful because it extracts more energy from the river. To avoid the expense of supporting cables above the river (and to allow more gentle curves), the cables (which would probably look more like rails) would be laid on the river bed and be anchored periodically to it. The rails and “mule” could be a waterproofed linear induction motor. There would be many details to work out (which parts of the route require the bundle to be parallel to the river to avoid snagging and which allow it to be perpendicular to increase drag, are reflectors enough to avoid collisions with boats? what kind of ramps are needed to get over rapids when water is low, is it worth making the upstream parts of the rail network removable to follow logging operations?…) but it would replace trucks that consume energy (and, as some of the heaviest trucks on the road around here, tear up roads) with something that generates electricity while carrying logs to sawmills that are still in large part sited near rivers and downstream of the forests that supply them.