Pendant des siècles, les péniches étaient propulsées le long des chemins de halage par la force des hommes, des chevaux ou des mulets. Avant que le diesel domine le marché, les ingénieurs ont inventé plusieurs systèmes électriques : les toueurs, les halages funiculaires et les mulets électriques.
Une grande partie de ces solutions écologiques pourraient aujourd’hui remplacer les moteurs diesel. Grâce à leurs faibles coûts énergétiques, elles fonctionnent facilement à l’énergie renouvelable des turbines hydrauliques situées aux écluses du canal même. Une ligne de touage est toujours opérationnelle.
La majorité de ces systèmes étaient au moins quatre fois plus efficaces que les chalands équipés d’un moteur diesel
Comme expliqué précédemment, l’utilisation de trolleybus et de camions trolley serait aujourd’hui logique. Ces transports électriques avantageux utilisent une technologie simple et disponible.
Cette méthode a aussi été utilisée pour les bateaux — non pas en mer, mais sur les canaux. D’autres bateaux étaient aussi propulsés par des systèmes proches des funiculaires. Une autre technique combinait technologie ferroviaire classique et chalands de canal.
Ces découvertes datent de l’aube du XXe siècle. La plupart viennent de France, quelques-unes d’Allemagne, de Belgique, et d’autres (au stade expérimental) des États-Unis.
Jusqu’à la deuxième moitié du XIXe siècle, les chalands de canal sont le moyen de transport principal des marchandises pour les longues distances, traversant des régions dans lesquelles les cours d’eau naturels ne sont pas bien navigables. À la fin des années 1800, il y a entre 19 300 et 24 000 kilomètres de canaux à travers toute l’Europe. Aux États-Unis, en 1880, la longueur totale des canaux avoisine les 7 200 kilomètres.
Les mulets et les chevaux
À partir des années 1840, le développement rapide des chemins de fer menace de rendre obsolètes les réseaux de canaux. En 1880, la construction de chemins de fer entraîne l’abandon de 3 200 kilomètres de canaux aux États-Unis.
À la moitié du XIXe siècle, les péniches ont une capacité allant jusqu’à 240 tonnes. Elles sont tractées par des chevaux ou des mulets sur les chemins de halage (les voiles sont inutilisables sur la majorité des canaux).
Cette méthode est bien plus efficace que le transport terrestre non motorisé : un cheval transporte 10 fois plus de marchandises en tractant une péniche plutôt qu’une charrette. Les chemins de fer disposent cependant d’une meilleure capacité de charge et d’une vitesse accrue.

Dans la plupart des pays, les animaux de trait restent la seule méthode utilisée pour les canaux, jusqu’à l’arrivée des moteurs diesels à partir des années 1930 ou l’impraticabilité des canaux, comme au Royaume-Uni. Pour contrer la baisse du trafic à la fin du XVIIIe siècle, des gouvernements et entreprises du secteur encouragent les ingénieurs à trouver des méthodes de propulsion pour bateaux, plus modernes et plus efficaces, afin de concurrencer les chemins de fer.
Les chalands à vapeur
La solution logique pour le transport en chaland est le moteur à vapeur, la même technologie que dans les trains. Certains chalands de canal sont ainsi convertis en véhicules à vapeur indépendants ou en pousseurs. Très vite, ces changements se sont révélés impossibles à appliquer sur un grand nombre de bateaux,
à cause de l’état des canaux : à l’époque, ces derniers ne sont qu’un grand fossé. Si tous les chalands s’équipent d’un moteur à vapeur ou sont tractés par des bateaux à vapeur, les remous provoqués par les hélices (ou roues à aubes) détruiront les berges des canaux.
Un obstacle supplémentaire est la profondeur des canaux, dont le milieu, ne dépasse pas les 2,5 mètres. Cette profondeur pose problème, car la poupe d’un bateau à hélice s’enfonce dans l’eau à mesure que le bateau accélère.
En outre, la taille conséquente des moteurs à vapeur empiète sur l’espace de stockage, diminuant ainsi l’efficacité du transport. Par conséquent, bien que les bateaux à vapeur naviguent sur les rivières et les lacs depuis la fin du XVIIe siècle, seuls 84 d’entre eux naviguent sur les canaux américains en 1906.
Batteries
Ces obstacles empêchent la mise en place d’une autre option logique : les bateaux à moteur électrique. À la fin du XIXe siècle, des milliers de voitures électriques roulent déjà.
La première « automobile » (ou le premier bateau) disposant de sa propre batterie avait déjà fait ses preuves en 1838, et à la fin des années 1870, l’une d’entre elles traverse même la Manche. Mais ces bateaux ne sont pas adaptés à la navigation sur canal. Comme les bateaux à vapeur, les hélices ou les roues à aubes provoquent des remous, détruisant les berges fragiles des canaux. De plus, les batteries prennent presque tout l’espace de stockage.
Aperçu des différents systèmes électriques
Au final, les ingénieurs trouvent la solution de la propulsion électrique sans batterie. Ces systèmes peuvent être grossièrement divisés en cinq catégories :
- Toueur à hélice avec moteur à bord.
- Toueur à chaîne immergée avec moteur à bord.
- Funiculaires avec moteur sur la berge.
- Mulet électrique conduit par l’homme avec moteur sur la berge.
- Mulet électrique avec moteur sur la berge ou au-dessus de l’eau.
La plupart de ces systèmes sont d’abord mis en place avec les moteurs à vapeur, puis adaptés à l’électricité pour les rendre plus efficaces et plus pratiques. Par la suite, certains systèmes sont convertis au moteur diesel. À l’exception des bateaux funiculaires, tous les systèmes électriques sont alimentés par une ligne trolley.
Même si quelques technologies ont rencontré un succès local, elles n’ont jamais été très répandues, malgré les essais concluants. À l’époque, le pic pétrolier et le réchauffement climatique ne préoccupent pas les esprits. La majorité des pays choisissent d’approfondir ou de renforcer leurs canaux pour s’adapter aux automoteurs, puis aux moteurs diesel.
À la fin de cet article, je vous explique pourquoi les toueurs sont notre meilleure chance de développer un réseau de transport terrestre de marchandises , sans pétrole, et de grande capacité. Ils méritent notre attention.

1. Les toueurs à hélice
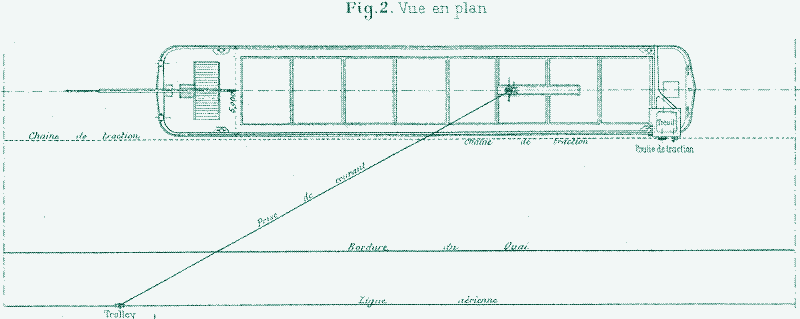
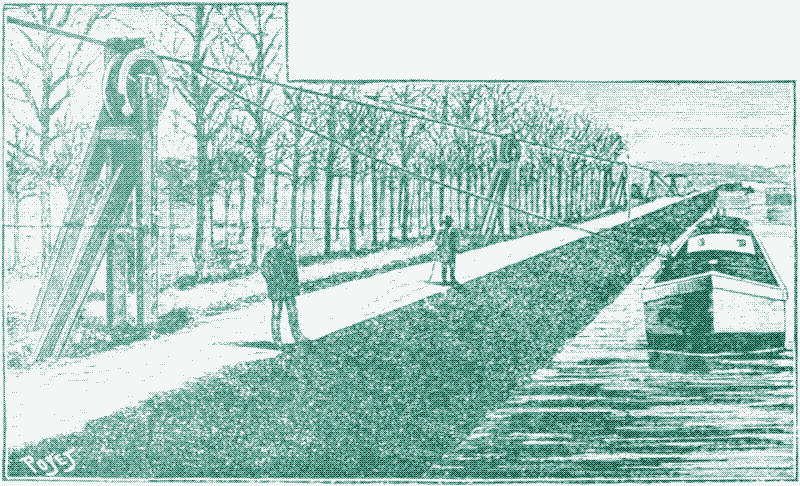
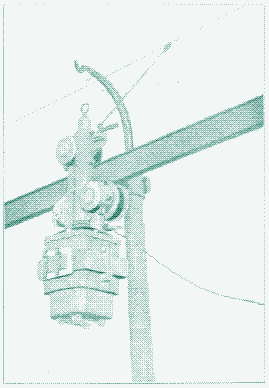
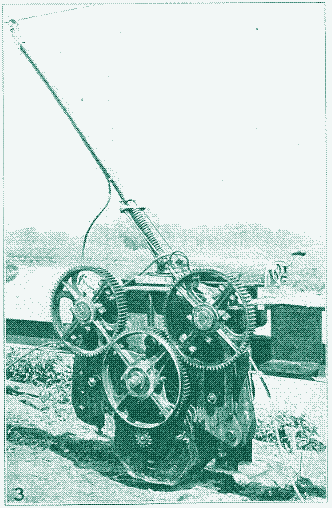
Une des premières alternatives à la traction animale est le toueur à hélice. Seulement quatre ans après le premier trolleybus expérimental, Frank W/ Hawley transforme un bateau à vapeur de canal classique en un toueur (qui porte son nom). Le modèle est testé sur le canal Érié (aux États-Unis) en 1893.
Ses deux moteurs électriques, d’une puissance de 25 ch chacun, alimentent deux hélices. Ils reçoivent du courant grâce à une paire de fils suspendus au-dessus du canal à l’aide de deux perches de trolley ordinaires (voir photo à droite).
Puisque le bateau se déplace plus ou moins latéralement, la surface de contact doit être flexible. En outre, le canal ne peut servir de retour ; un double circuit métallique doit être utilisé : deux fils sont donc nécessaires pour diriger les bateaux dans chaque sens.
Les remous
Le toueur s’avère être une meilleure option que le bateau à moteur électrique, car l’espace de stockage n’est pas encombré : les moteurs électriques sont plus petits que les moteurs à vapeur, et fonctionnent sans batterie. De plus, l’autonomie du bateau est illimitée.
Cependant, tout comme le bateau à moteur électrique et le chaland à vapeur, l’hélice provoque des remous, posant ainsi des problèmes similaires pour les berges. La seule manière d’éviter les remous est de réduire la vitesse, ce qui ne joue pas en la faveur des toueurs.
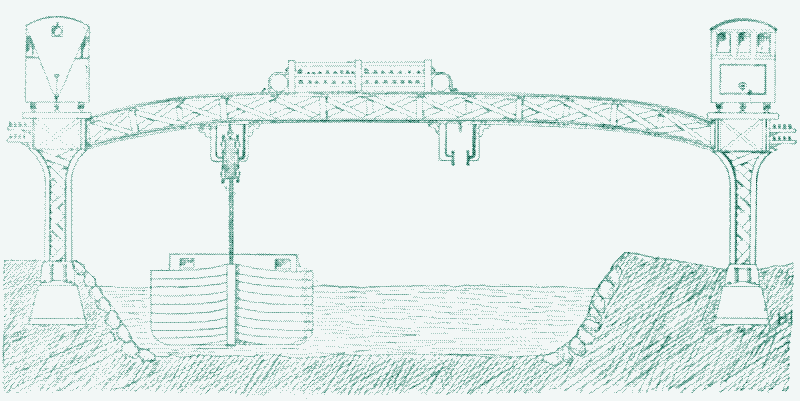
Le transbordeur toueur
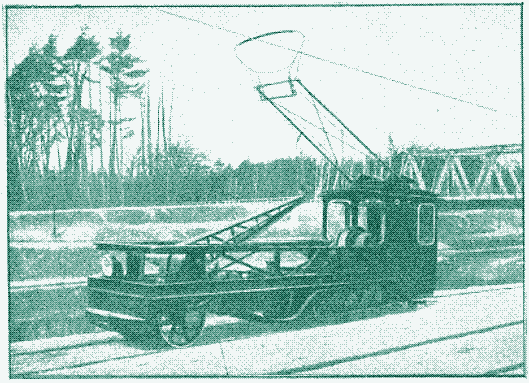
Les toueurs et les autres systèmes à propulsion électrique n’ont jamais été installés sur le canal Érié. En effet, ce canal, qui est long de 566 kilomètres (et le plus important des États-Unis), est approfondi et renforcé en 1918 pour accueillir les automoteurs. Le transbordeur toueur restera lui aussi à l’état de projet (voir l’image ci-dessous).
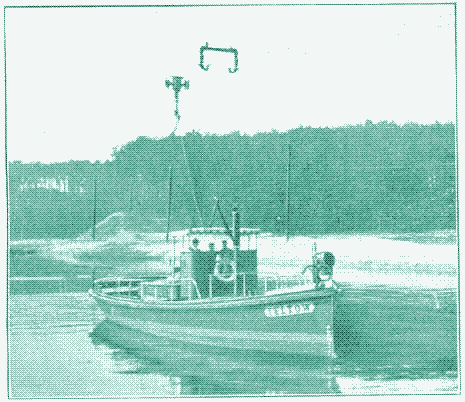
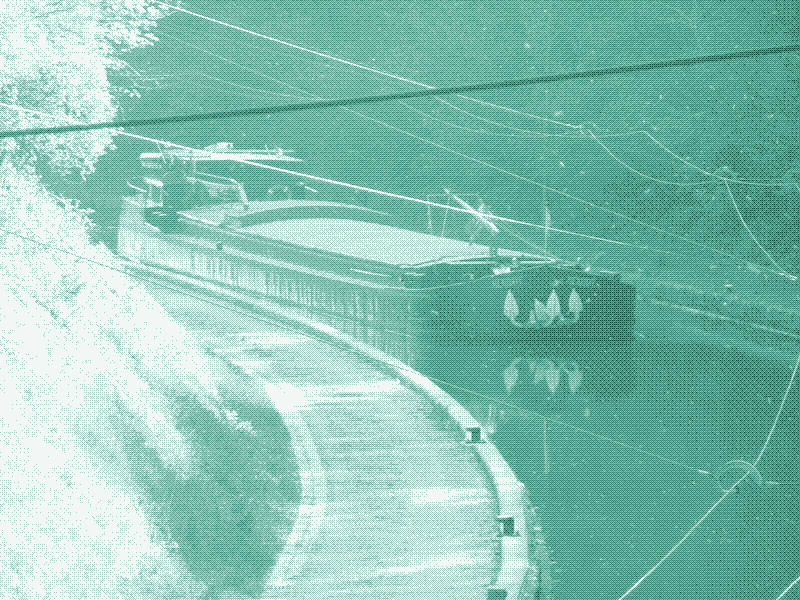
En 1903, les Allemands mettent au point un toueur à hélice sur le canal de Teltow (voir photo ci-dessus). Ce bateau très sophistiqué ne provoque presque aucun remous grâce à une disposition unique de ses trois hélices. Cependant, le mulet électrique (détaillé plus bas) est préféré.
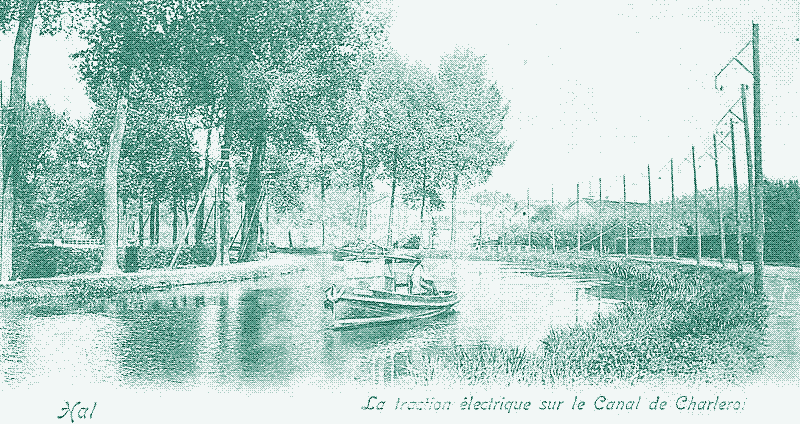
Ci-dessous se trouve une photo de la supposée unique ligne de toueur à hélice qui a servi à des fins commerciales. En 1899, elle est installée sur 4 kilomètres, le long du canal Charleroi-Bruxelles en Belgique. Les toueurs tractent des chalands de canal sans moteur. La ligne fait partie d’un réseau de mulets électriques long de 47 kilomètres, mais elle ne reste en service que quelques années.
2. Le toueur à chaîne immergée ou traction par chaîne
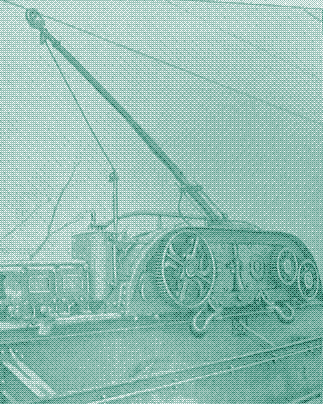
En Allemagne, France et Belgique, un autre système est à la mode : la traction par chaîne. Les premiers modèles comportent un moteur à vapeur (voir image à droite et ci-dessous), mais ils sont par la suite remplacés par des moteurs électriques combinés à un système de touage.
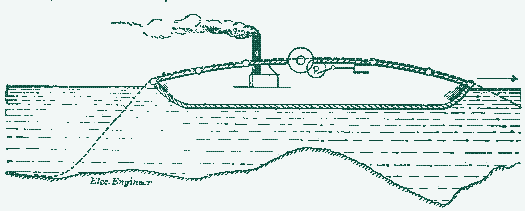
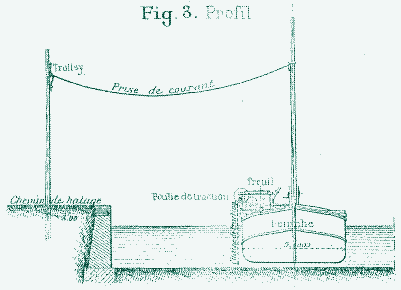
Initié par l’ingénieur français François Galliot, ce dispositif combine le système de touage décrit ci-dessus avec une propulsion différente : un câble ou une chaîne installé au fond du canal est soulevé, puis s’agrippe fermement autour des rouleaux ou des roues du bateau. Ces rouleaux sont en rotation grâce au moteur à bord (situé au-dessus ou à côté), et leurs mouvements tractent le bateau sur le câble le long du cours d’eau.
La disposition générale reste très proche de celle des toueurs à hélice, mais ici le moteur fait tourner une roue à empreinte ou des installations machines. Ce système a pour réel avantage de ne pas provoquer de remous, rendant ainsi la navigation possible sur les canaux peu profonds et délicats.
En outre, puisqu’il n’y a ni double fil conducteur ni double véhicule de touage conducteur , le câble peut être utilisé comme conducteur de retour. Le système fonctionnant avec un seul fil, la disposition des conducteurs et les appareils de connexion sont plus simples et donc moins coûteux.
Le canal de Bourgogne
À la fin des années 1860, les transporteurs câblés à vapeur sont déjà en service, principalement sur les rivières. Deux d’entre eux naviguent sur 125 kilomètres le long du canal Érié (aux États-Unis) entre 1873 et 1880, mais ils interfèrent tellement avec le reste des bateaux qu’ils sont laissés à l’arrêt.

Vers la fin 1893 (l’année du test du toueur à hélice sur le canal Érié), le premier système immergé de câbles électriques est installé dans le canal de Bourgogne. La machinerie de transport fonctionne à l’aide d’un moteur électrique à bord qui reçoit du courant par un circuit de touage aérien (voir photo ci-dessus). La ligne opère à partir de 1894 et reste en service pendant plus de 20 ans.
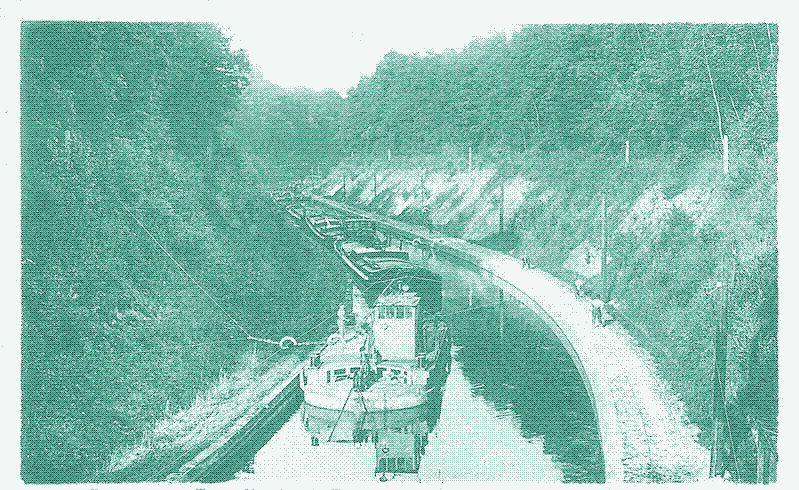
Les voûtes
La voie, longue de six kilomètres, traverse une voûte de 3,3 kilomètres à Pouilly-en-Auxois. Elle remplace un transporteur câblé à vapeur qui opérait depuis 1867. L’utilisation de ce système électrique (comme d’autres, décrits plus bas) pour traverser la voûte n’est pas fortuite.
La plupart des voûtes traversant des montagnes et des coteaux sont trop étroites pour un chemin de halage. Par conséquent, les chevaux sont conduits au-dessus de la montagne pendant que le bateau progresse dans la voûte grâce à la force humaine.
Pour faire avancer le bateau, des hommes s’allongent sur des planches sur le toit du bateau et « marchent » littéralement sur le plafond. Ces hommes étaient soit les bateliers du bateau, soit des personnes (appelés « marcheurs ») proposant leurs services.
Cette méthode est extrêmement lente, c’est pourquoi les voûtes sont les premières à être équipées de câbles de traction à vapeur immergés. Cependant, à cause des fumées d’échappement, cette méthode de propulsion n’est pas vraiment adaptée à l’espace réduit ; les câbles sont convertis à l’énergie électrique lorsque cela devint possible.
Zéro émission
L’installation sur le canal de Bourgogne est un succès : elle devient le premier navire de commerce à système de propulsion électrique qui opère régulièrement . De plus, ce type de transport n’émet pas d’émission : l’électricité est produite des deux côtés de la voie à l’aide de turbines placées sous les cascades de deux écluses successives dont la chute atteint les 7,5 mètres. Outre l’avantage écologique, l’utilisation d’électricité renouvelable rend la ligne exploitable à moindre coût.
La seule ligne de touage encore en service
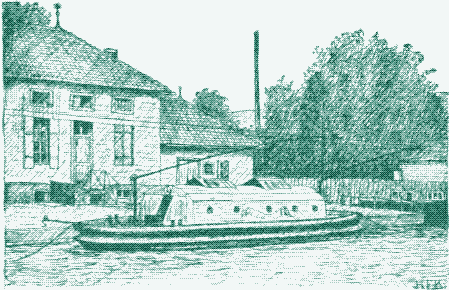
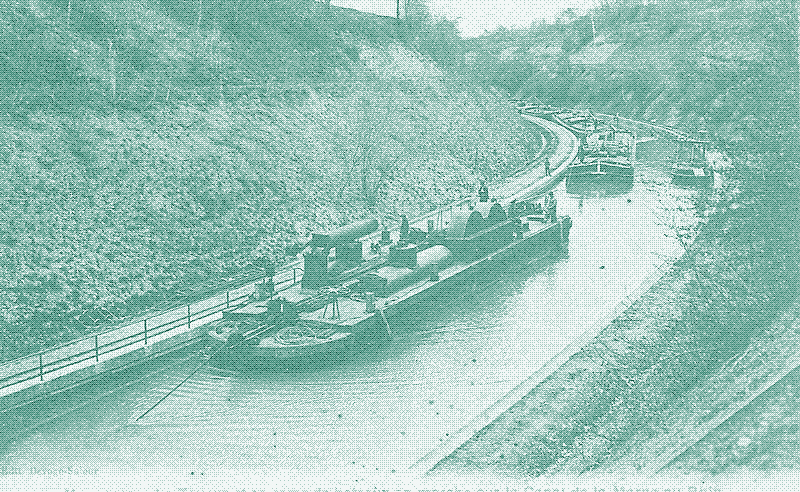
Bien plus tard, en 1933, une autre ligne est mise en place sur le canal de la Marne au Rhin. Ce système, encore en service aujourd’hui (voir photo ci-dessous), remplace un système funiculaire (détaillé plus bas). Ici aussi, la ligne de touage est utilisée pour traverser un tunnel-canal appelé « tunnel de Mauvages », long de presque 5 kilomètres.
En 1936, la ligne de touage est combinée à des mulets électriques (détaillé plus bas) qui opèrent tout le long du canal, hormis pour le tunnel, qui ne dispose pas de chemin de halage. Ce système reste opérationnel, car les fumées des chalands au diesel (qui ont remplacé les mulets électriques le long du reste du canal) suffoqueraient les bateliers lors de la traversée.
Cette méthode présente des inconvénients, c’est pourquoi elle ne peut être déployée à plus grande échelle. D’une part, les virages sont une difficulté pour ce système. La chaîne ou le câble au fond du canal est lâche, et frôle souvent les berges. Cela entraîne les bateaux contre les bords et les abîme.
D’autre part, si le canal comporte beaucoup d’écluses, le câble doit régulièrement être tiré et relâché, augmentant ainsi la difficulté et le temps de transport. Par conséquent, la traction par câble immergé est souvent limitée à des lignes droites du canal comportant peu d’écluses.
3. La traction par câble (funiculaires)
L’ingénieur français Maurice Lévy s’inspire des funiculaires plutôt que des trolleybus. En 1888, il expérimente la traction par câble près de Paris, au confluent des canaux de Saint Maur et de Saint-Maurice. Ce lieu est choisi, car ses canaux se rejoignent dans un angle droit : tourner les bateaux s’avère donc être particulièrement difficile.
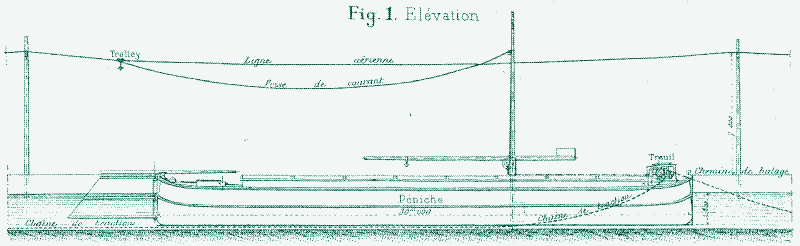
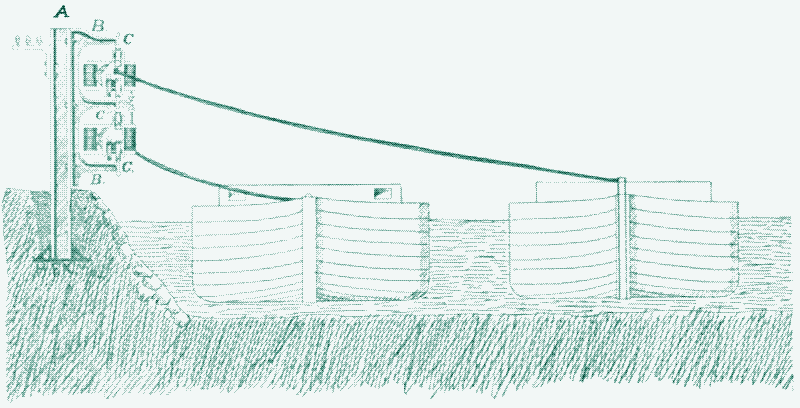
Contrairement aux deux systèmes décrits ci-dessus, il n’y a pas de moteur à bord du bateau. Les bateaux sont tractés par un câble mobile installé sur chaque berge, porté par des supports dotés de poulies qui opèrent parallèlement au canal. Le câble est tiré par un moteur fixe, lui-même placé sur les berges de la rivière, et les bateaux sont attachés au câble à l’aide de câbles porteurs. Cette technologie se retrouve dans les systèmes de transport par câble et la transmission d’énergie par câble.
Des bras adéquats, auxquels sont reliés des dispositifs adaptés qui agrippent et tiennent le câble mobile, dépassent du bateau. Le bateau peut démarrer ou s’arrêter en accrochant ou en décrochant le crochet avec le câble aux dispositifs adaptés sur le bateau. Grâce à ce système, un bateau peut se déplacer à 4 km/h.
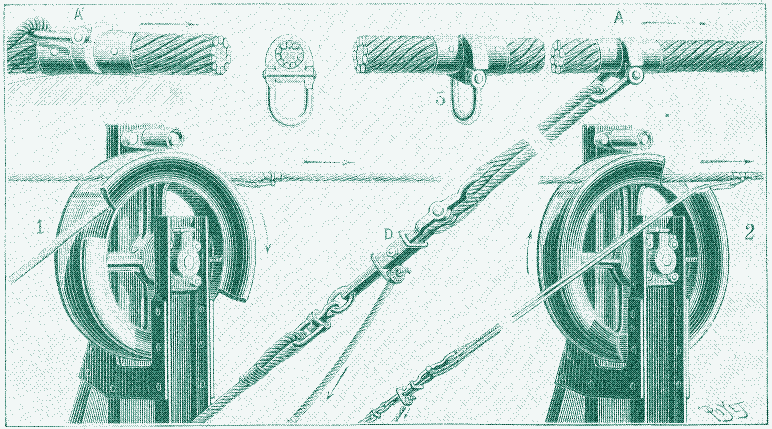
Le câble est installé à quelques mètres du bord pour que le chemin de halage reste libre. Ainsi, cette méthode peut être combinée à celle des bateaux tractés par des chevaux ou des mulets, contrairement aux méthodes décrites plus haut. Les poulies (voir sur les petites images ci-dessus et ci-après) sont placées à la verticale sur une ligne droite, et plus ou moins inclinées dans les virages.

Le câble est fourni avec des liens auxquels la corde est apposée pour tirer le bateau (voir la gravure ci-dessous). Ces liens, fixés entre des anneaux, peuvent tourner librement avec le câble pour éviter les problèmes de tension de ce dernier. Afin d’empêcher le câble de sortir des roues à gorge, il est maintenu en place par un petit rouleau prédominant. Les brides des poulies sont dentelées pour laisser passer les liens qui tirent le bateau.
Au départ, le câble passe au-dessus de trois grosses poulies, actionnées par le moteur à vapeur situé dans une petite centrale électrique sur le bord du canal (voir illustration ci-dessus). À la droite, une quatrième poulie portée par un petit wagon équipé d’un contrepoids sert à garder le câble bien tendu.
La traction par câble offre quelques avantages intéressants par rapport aux méthodes précédentes. Comme avec la traction par chaîne immergée, le bateau ne provoque pas de remous. En outre, un moteur n’est pas requis à bord : l’espace qui devrait lui être dédié reste donc libre pour le transport. Les chalands peuvent aussi être utilisés sans adaptations spécifiques ni toueur. À cela se rajoutent les virages et les écluses qui sont bien plus doux à passer qu’avec la méthode de la chaîne immergée (décrite plus haut).
Mises en œuvre
Malgré ses avantages évidents, ce prototype de ligne est démantelé quelques années plus tard, comme son homologue allemand. Lévy installe son seul système commercialisé sur le canal de l’Aisne à la Marne, tirant des chalands sur 2,6 kilomètres dans la voûte de Mont de Billy. Ce système reste en service jusqu’aux années 1940 (voir photo ci-dessous).
Les moteurs à vapeur de l’ingénieur français sont un problème. À l’époque, il n’a pas beaucoup d’options pour tirer le câble. Chaque câble doit opérer par longueur d’environ huit kilomètres de chaque côté de la centrale. Le câble sortant est utilisé pour les bateaux naviguant dans une direction, et le câble de retour (après la traversée du canal) pour ceux naviguant dans l’autre (voir l’illustration ci-dessous). En arrivant à la fin de chaque circuit, les bateaux doivent être détachés du câble et accroché au câble du circuit suivant. Chaque circuit doit donc posséder son moteur à vapeur et le personnel pour le faire fonctionner. Par conséquent, le système peut être extrêmement coûteux.
Funiculaires électriques
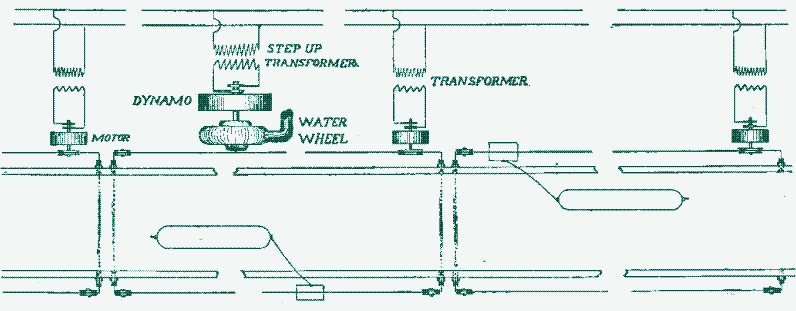
Maurice Lévy est un visionnaire, car dix ans plus tard, la technologie de production d’électricité s’est considérablement améliorée. Les Américains conçoivent un plan similaire, mais ils se servent de générateurs électriques alimentés par une source d’énergie économique (comme les chutes d’eau d’une écluse). Avec cette méthode, tous les circuits ne requièrent pas leurs propres générateurs, car l’électricité peut être transportée (voir illustration ci-dessous). Malheureusement, comme mentionné plus haut, les États-Unis préfèrent approfondir et renforcer les canaux pour accueillir les automoteurs ; les plans ne seront jamais réalisés.
Un seul système de funiculaire alimenté à l’électricité est efficacement intégré et exploité. Il se situe sur deux parties séparées du canal de la Marne au Rhin. Après un essai concluant en 1910 à Jarville (près de Nancy), il est entièrement installé par un autre ingénieur français, Édouard Imbeaux, juste avant la Première Guerre mondiale. Il remplace un toueur à câble immergé (décrit plus haut).
La première ligne mesure sept kilomètres et passe par le tunnel des Mauvages, long de cinq kilomètres. La seconde ligne mesure cinq kilomètres de long et traverse le souterrain de Foug. La vitesse du câble peut être ajustée afin de passer les écluses. Ces lignes sont utilisées jusqu’en 1933, date à laquelle elles sont remplacées par des chalands encore en service aujourd’hui (décrit ci-dessus).
4. Transport par locomotive (mulets électriques)
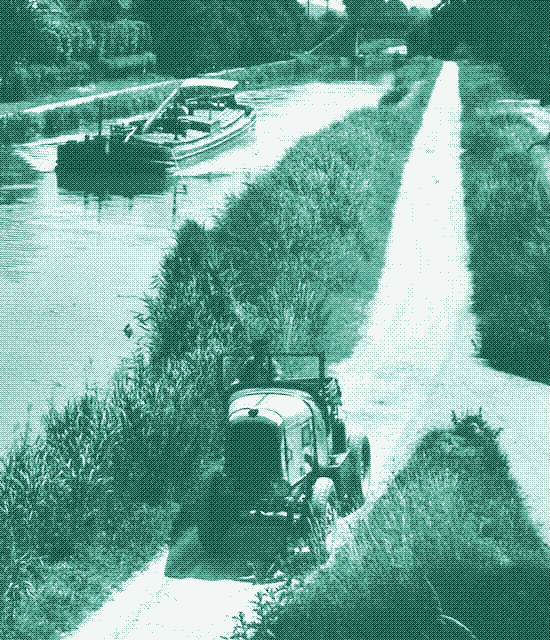
La méthode la plus commune et la plus utilisée (au moins sur le plan régional) consistait à tracter ou transporter des bateaux le long des canaux grâce à des mulets. Mais les mulets, trop lents et peu économiques sont vite remplacés par des mulets électriques accrochés aux lignes de touage. Les machines sont placées soit sur des voies ferrées le long des rives du canal (avec ce modèle ressemblant à une voie ferrée, les bateaux sont reliés aux voitures grâce à un câble de remorquage long de 50 mètres), soit directement sur le chemin de halage (cette méthode s’apparente à un convoi de trolleybus) (photo ci-dessous).
Tout comme pour les systèmes à traction animale, la présence de deux hommes est nécessaire : un sur les rives (pour conduire le train ou le camion) et un sur le bateau (pour le piloter). Cette méthode offre les mêmes avantages que les funiculaires, car aucun des bateaux n’est équipé d’un moteur : tout bateau tracté par des mulets et des chevaux peut désormais être tracté sans l’aide d’un remorqueur particulier. Les berges des canaux restent intactes ; la nécessité de circuler en eaux profondes est éludée.
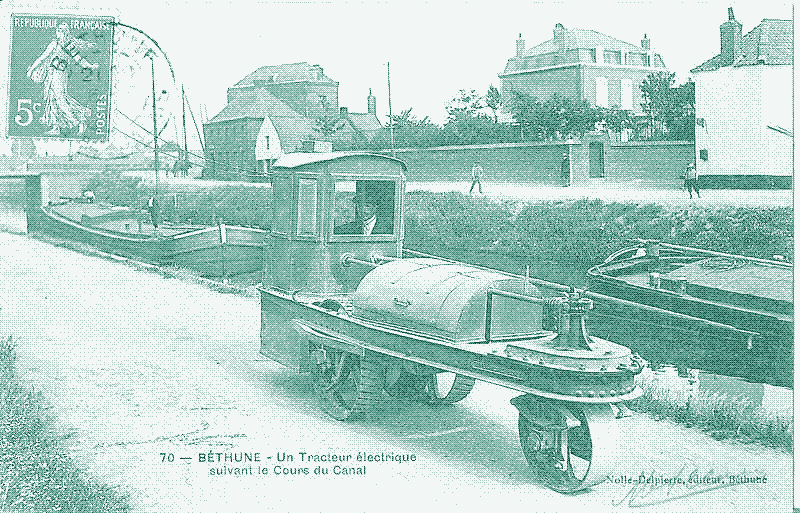
En France, après quelques années de tentatives infructueuses avec les locomotives à vapeur (à partir de 1973), un premier « cheval électrique » est testé par M. Galliot sur le Canal de Bourgogne, en 1895. C’est un petit tracteur routier à trois roues (voir première photo). Il avance sur le chemin de halage grâce à des jantes métalliques (sans avoir besoin de rail) et peut tracter un chaland à une vitesse de 2,5 à 3 km/h . La vitesse n’est certes pas beaucoup plus élevée que dans le cas d’un chaland tracté par un animal, mais le cheval électrique peut tracter beaucoup plus marchandises.
L’année suivante, la Société de Halage Électrique installe cette technologie sur 43 kilomètres, le long du Canal de la de la Deûle et du Canal d’Aire reliant Béthune à Douai à la frontière belge. Après avoir essuyé quelques difficultés, un service annuel régulier est mis en place à partir de 1898. La voie est étendue à 55 kilomètres allant ainsi jusqu’à Courchelettes en passant par le Canal de Dérivation de la Scarpe. En 1900, 120 de ces tracteurs sont en service.
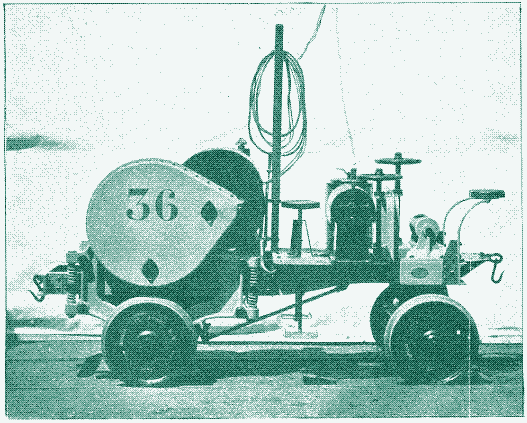
Malheureusement,les jantes métalliques abîment fortement les chemins de halages et les coûts de maintenance sont très élevés. En 1904, le système est mis hors service pour laisser place à des tracteurs sur rails.(photo ci-dessus). De nouveaux essais avec cette technologie sont réalisés en 1902 sur un kilomètre du Canal de la Sensée (reliant Courchelettes à la rivière de l’Escaut).

Ces tracteurs conçus par M.Chanay sont deux fois plus puissants que les trolleybus (avec une puissance de 40 ch et un poids de 6 tonnes), et peuvent tracter 3 ou 4 chalands à une vitesse de 3 km/h. En 1904, le système ferroviaire est installé le long du Canal de la Sensée, long de 28 kilomètres, et le long des secteurs les plus fréquentés des 55 kilomètres de canaux précédemment desservis par les tracteurs.
En 1907, environ 30 tricycles (sans rails) et 60 tracteurs sur rails sont mis en en service sur cette trajectoire de 83 kilomètres et un total de 3 408 764 tonnes de marchandises sont transportées (approximativement 20 000 trajets de chaland).
3 731 kilomètres
Le réseau se développe peu à peu (voir cartes ici - scroll to the right -, ici et vite, ici) et les mulets électriques deviennent monnaie courante sur les canaux du Nord et de l’Est de la France.
En 1940, ils opèrent sur 2 986 kilomètres de canaux. À son apogée en 1958, le réseau parcourt 3 731 kilomètres dont 1 047 sur rails (avec 1 700 tracteurs) et 2 684 sur pneus (avec 770 tracteurs fonctionnant principalement au diesel). Les trolleybus sont déjà considérés obsolètes. Les mulets électriques sont utilisés jusqu’en 1973.
Abolition de la force animale
Les mulets électriques fonctionnant sur rails se révèlent bien plus fiables sur les chemins de halage que les trolleybus. Ils peuvent fonctionner jour et nuit, durant toute la semaine. Le système de trolleybus ne fonctionne qu’en journée (la nuit, trop de conducteurs se seraient noyés) et ne peut pas être utilisé pendant l’hiver. Ce système de rail demande moins de maintenance et est deux fois moins coûteux que le système de trolleybus. Cependant, à cause des coûts d’investissement de ce système, les trolleybus sont mieux adaptés pour les zones moins fréquentées.

Cela dit, ces deux systèmes mécaniques sont bien plus fiables, rapides et économiques qu’un système de traction animale. La traversée du Canal de la Sensée dure un jour, contre 3 à 4 avec un mulet. Jusqu’en 1940, les systèmes de traction mécaniques (et les bateau automoteurs) et animales cohabitent sur certains canaux. Après cette date, la traction animale est interdite. Les animaux, trop lents, gênent les tracteurs électriques même s’ils travaillent sur l’autre rive du canal. À partir de cette date, seuls les systèmes mécaniques sont autorisés à tracter les chalands.
Belgique
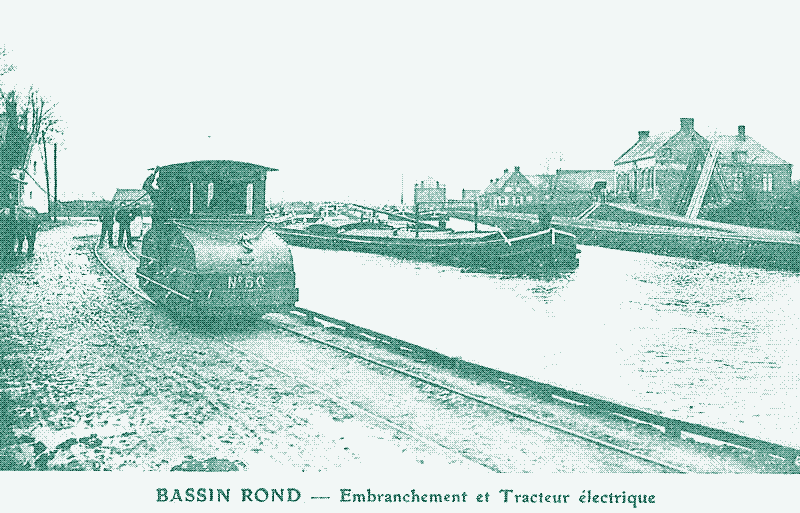
Les mulets électriques sont utilisés dans d’autres pays mais à plus petite échelle. D’ailleurs les Français ne sont pas les premiers à les avoir utilisé, mais les Belges. En 1901, un tronçon de 16 kilomètres du canal reliant Bruxelles à Charleroi est équipé de mulets électriques (sur rails et sur pneus) grâce à Léon Gérard (photo de droite). Il est étendu plus tard à 47 km. Comme indiqué plus haut, une partie de cette ligne est (pendant quelques années) desservie non pas par des mulets électriques mais par des toueurs.
Allemagne
En 1890, les Allemands entament des essais sur le Canal de Finow avec des locomotives à vapeur. Les résultats sont spectaculaires ; ces machines peuvent tracter 7 chalands à une vitesse de 7 km/h sans créer trop de remous. Cependant, ce système consomme énormément d’énergie et n’est donc pas du tout économique.
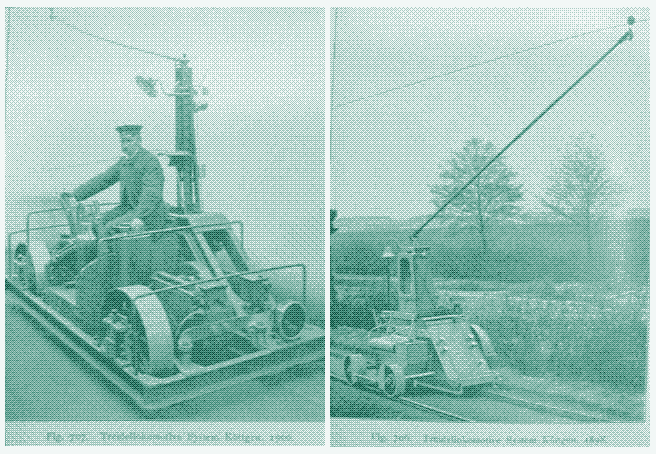
En 1899, des essais sont effectués avec un tracteur électrique sur rail imaginé par M. Kottgen, un ingénieur de chez Siemens. Ce modèle diffère des mulets électriques fonctionnant sur un seul rail, utilisés par les Belges et les Français. Sur les rives du canal, ces véhicules ne roulent pas sur des rails mais sur de très grandes roues en fer (photos ci-dessus)
Ces grosses roues offrent plus de stabilité aux tracteurs, mais forment d’énormes sillons sur le chemin de halage. Cette méthode a été mise en place pour économiser de l’argent sur le coût des rails, mais les coûts d’entretien se sont révélés énormes. Le système a été abandonné.
En 1903, les Allemands installent un système de traction mécanique, similaire à celui utilisé par les Français, sur une partie (1,3 kilomètre) du Canal de Teltow, près de Berlin.
En 1905 et 1906, ce réseau est étendu sur 70 kilomètres grâce à 22 véhicules. Il est utilisé jusqu’en 1945, date à laquelle il est détruit par les soviétiques.
Les véhicules allemands étaient plus sophistiqués que les véhicules français. En réglant mécaniquement le câble de remorquage, un limitateur régulait la vitesse du bateau tandis que la vitesse du tracteur restait la même. En France, la vitesse des tracteurs est vite augmentée pour éviter qu’ils se fassent entraîner dans l’eau par les chalands
Un système similaire au niveau technique mais utilisé pour des raisons différentes est toujours en service sur le Canal du Panama. Sur ce canal, les mulets électriques guident les grands navires (qui continuent à utiliser leurs moteurs) au lieu de les tracter.
Aux États-Unis, plusieurs mulets électriques sont testés mais aucun n’est mis en service, à l’exception d’un service minimum sur une partie du Canal Érié dans l’Ohio en 1900. Il fonctionne sur 67 kilomètres. À l’origine, il doit s’étendre sur une distance d’environ 393 kilomètres tout le long du canal reliant Toledo à Cincinnati. Mais l’entreprise fait rapidement faillite et les rails existants sont démontés.
#Traversées à deux chalands
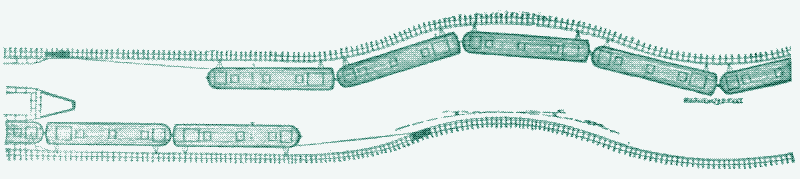
En France, sur la plupart des canaux, les chalands ne sont tractés que d’un seul côté. Lorsque deux tracteurs allant dans des directions opposées se rencontraient, ils changeaient de chaland et retournaient d’où ils venaient (un des chalands devait naviguer par-dessus le câble de remorquage de l’autre).
Cette méthode était déjà utilisée avec les mulets ou les chevaux, des siècles auparavant. Sur le Canal de Teltow et sur quelques canaux en France, des rails sont construits sur les deux rives. Le tractage est plus facile mais bien plus onéreux.
Chargement et déchargement
Bien qu’efficaces, les mulets électriques perturbent le chargement et le déchargement des marchandises. Mais comme le montre l’illustration ci-dessus , ce désagrément a été contourné en construisant un dock et deux voies supplémentaires (configuration testée sur le Canal de Teltow).
Les tracteurs sont fabriqués à partir de béton armé afin d’éviter qu’ils soient entrainés dans le canal par les chalands. De plus, le rail sur le côté du canal est placé quelques centimètres plus haut que l’autre.
Automobiles
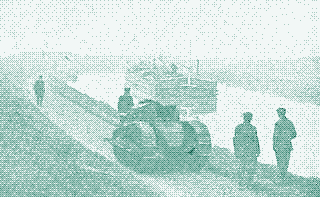
Au fur et à mesure, plusieurs types de véhicules sont utilisés. Les camions diesel sont peu à peu remplacé par les trolleybus. En France et en Belgique les voitures classiques sont aussi utilisées (photo ci-dessous). Après la Première Guerre mondiale, les tanks et les véhicules militaires servent également à tracter les chalands (photo ci-dessus), sans grand succès. Pour varier leur matériel, des petites entreprises utilisent encore des animaux.
5 Mulets électriques automatiques
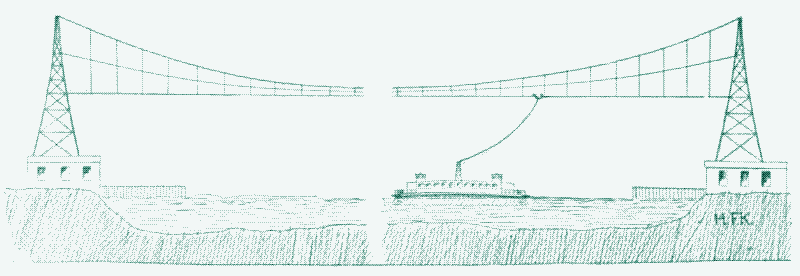
Des chercheurs américains ont inventé un système très étrange, combinant toutes les méthodes décrites plus tôt , mais cette méthode n’a finalement été utilisée qu’en France. Un mulet électrique automatique, actionné depuis le chaland est monté sur un rail, sur une crémaillère rigide ou suspendu par un câble, parallèlement a u canal, sur les rives ou au-dessus de l’eau. La locomotive automatique à laquelle les bateaux sont attachés au moyen d’un câble de remorquage et d’une ligne électrique reçoit le courant depuis une ligne de toueur.

Plusieurs systèmes ont été inventés puis testés, mais le plus connu reste celui inventé par Richard Lamb (photo ci-dessus). En 1896, trois ans après les essais faits avec le toueur inventé par Frank W.Hawley (décrit ci-dessus), le système Lamb est testé sur un tronçon de 6 kilomètres du Canal Érié (à Tonawanda) et sur le Raritan Canal dans le New Jersey. L’idée de départ est d’utiliser de l’électricité bon marché produite par les chutes du Niagara, mais l’essai se révèle infructueux. En 1898, le système Lamb est testé sur le Canal de Finow en Allemagne, mais les Allemands se tournent au final vers les mulets électriques.
Double structure
Avec le système Lamb, à l’approche d’un bateau venant de la direction opposée, les moteurs sont coupés et l’électricité déconnectée. Les bateaux changent de câbles (et donc de moteur) et continuent leur route.
D’autres systèmes ont permis le passage de deux chalands sans devoir échanger de moteurs, même si le rail n’était installé que d’un côté du canal.
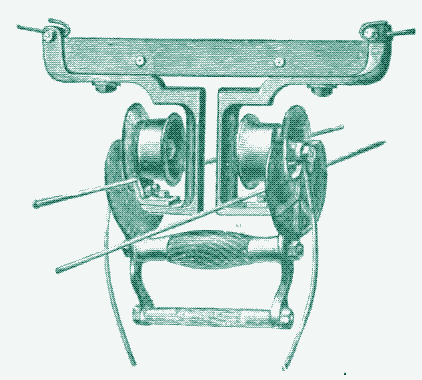
Ce système, inventé par Joseph Sachs (photo ci-dessous), présente une structure sur deux étages sur laquelle les moteurs ou les treuils sont placés entre les extrémités supérieure et inférieure des rails.
Un treuil similaire inventé par Wood est testé sur un tronçon du Canal Érié, en 1903. Le résultat est très concluant : quatre bateaux pleins sont tractés à une vitesse de 7,2 km/h, contre 2,8 km/h pour un chaland tracté par un mulet, tout cela sans abimer les berges.
Les membres de la commission devant laquelle les tests ont été réalisés sont satisfaits du succès de l’essai. Ils décident d’attendre la fin du projet d’extension et de renforcement du système de canaux de New York (Barge Canal) avant d’autoriser son installation permanente. Mais à la fin de ce projet, les bateaux à essence sont désormais la norme.
Un système inventé par Stillwell et Putnam est testé sur le Canal de Pasadena en 1907. Les essais se révèlent satisfaisants et la société du canal est convaincue de l’efficacité de cette technique. Mais pour justifier cette dépense, ils ont calculé qu’il fallait que trois fois plus de marchandises transitent sur le canal. Le projet ne s’est donc jamais concrétisé.
Débat
Les américains sont convaincus que le mulet automatique est le meilleur système électrique permettant de faire avancer les toueurs. Quant à eux, les Français et les Allemands trouvent ce système contraignant et préfèrent de loin les mulets pilotés par l’homme (leur invention). Selon eux, les mulets automatiques sont plus utiles dans les tunnels ou les ports . Ce système était pourtant intéressant car il n’encombrait pas les rives des canaux.
Ces différences d’opinions ont donné lieu à de nombreuses comparaisons dans des livres et magazines, avec à chaque fois des conclusions différentes. Toujours est-il que les américains n’ont jamais mis en place des mulets électriques(manuels ou automatiques) alors que les français ont eu recours aux deux systèmes ; les mulets automatiques étant réservés à des usages très spécifiques.
Zinzins
Le système de mulet automatique le plus spectaculaire est inventé par le français Chéneau. La petite locomotive de 600 kilogrammes suspendue grâce à un câble est surnommée « zinzins » et ressemble beaucoup au système Lamb. La ligne de touage qui alimentait le moteur est parallèle au câble.

Ce système installé en 1920 sert à faire entrer et sortir des écluses au nord et à l’est de la France. Cette tâche étant trop délicate pour les mulets ou les chevaux, des hommes doivent très souvent tracter les chalands à travers les écluses. Quelques « zinzins » ont continué de fonctionner jusqu’à l’arrivée des bateaux à moteur diesel.
Les Américains n’ont pas manqué d’idées ; ils ont pensé à suspendre un rail au-dessus du canal, sur lequel le moteur tournerait. Cette méthode aurait offert une traction directe, mais le coût de construction aurait été beaucoup plus important que celui des autres systèmes. Dans l’illustration ci-dessous on peut même voir qu’ils avaient envisagé la construction de rails en haut du système.
Oui au retour des toueurs !
Tous les systèmes précédents sont des exemples de technologies obsolètes. La batellerie est déjà l’un des moyens de transport de marchandises le plus avantageux sur le plan économique. Pour chaque litre de carburant brûlé, un chaland peut transporter une tonne de marchandises sur 127 kilomètres contre 97 kilomètre pour un train et 50 kilomètres pour un camion. (source). L’électrification des canaux pourrait davantage renforcer cette efficacité, et inspirer un système de transport de marchandises sans émission.
Aujourd’hui, beaucoup de canaux ont des rives plus solides, les systèmes de trolley à hélice ne posent plus de problèmes. Cependant, les systèmes où la traction se fait sur terre plutôt que dans l’eau, (compatibles avec tous les systèmes sauf ceux à hélice) sont très intéressants car très peu gourmands en énergie
Pour faire avancer un chaland assez lourd à faible vitesse, un mulet électrique (ou tout autre système décrit plus haut), nécessite un moteur quatre fois moins puissant que lorsque ce moteur, placé sur le bateau, propulse une hélice (source). Les roues sont plus efficaces que les hélices. Avec un litre de carburant, un chaland tracté par une machine sur les rives ou par une chaine placée au fond du canal peut transporter une tonne de marchandises sur 500 kilomètres . C’est dix fois plus qu’un camion.
Un système de transport sans émissions
De l’énergie renouvelable pourrait être produite sur les canaux grâce aux différentes hauteurs d’eau créées par les écluses. L’électricité nécessaire pour alimenter les chalands pourrait être produite par des éoliennes ou des panneaux solaires. Ce système de transport sans émissions pourrait également être installé dans les pays plats. Le besoin énergétique étant particulièrement faible, le coût d’investissement dans les énergies renouvelables serait aussi relativement faible (contrairement au projet consistant à charger les voitures électriques grâce aux panneaux solaires). Et comme toujours, les systèmes obsolètes peuvent être considérablement améliorés grâce aux innovations et à la technologie actuelle.
Canaux Low-tech
Même si les chalands de canal sont bien plus lents que les camions ou les trains, s’ils pouvaient transporter des marchandises pour presque rien, alors ils seraient la solution idéale pour transporter certaines marchandises. La solution serait plus intéressante si le prix de l’essence augmentait. Beaucoup de canaux aujourd’hui à l’abandon pourraient être remis en marche ; de nouveaux pourraient même être construits.
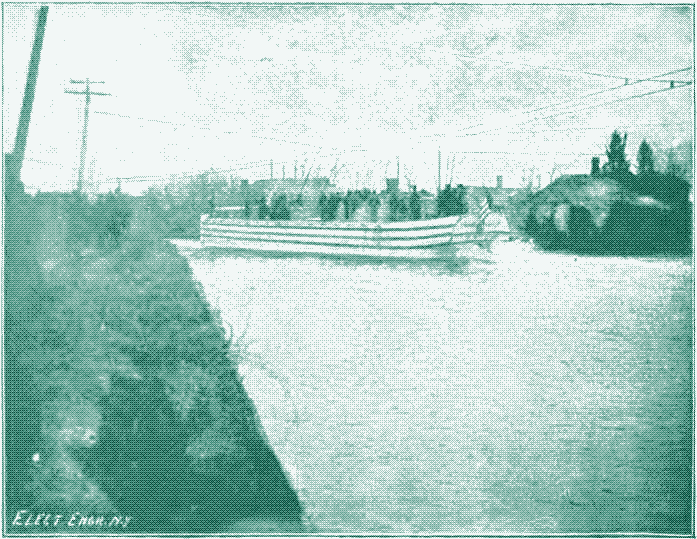
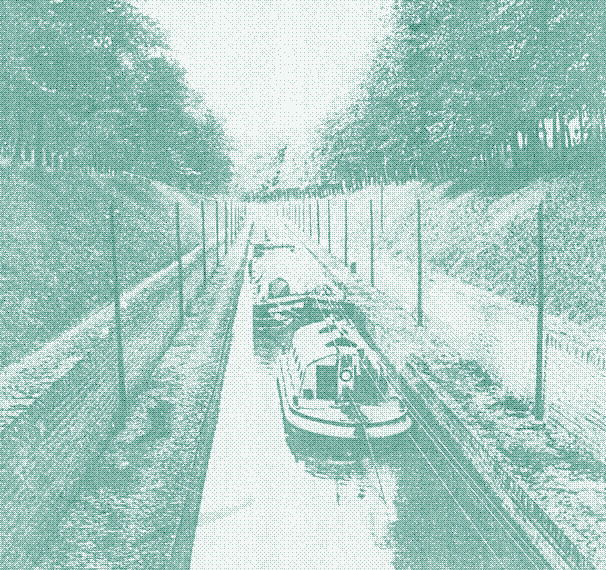
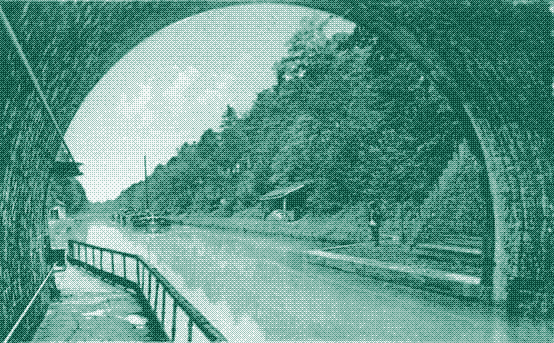
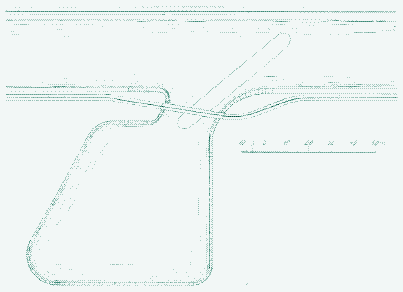
Les méthodes décrites plus haut étaient pensées pour des canaux « low-tech » de forme trapézoïdale, très peu profonds, mesurant deux mètres au centre et beaucoup moins sur les côtés (voir photo ci-dessous). Ce ne sont pas des travaux d’intérêt publics, comme le Canal de Panama, qui demandent des années de construction par des milliers d’ouvriers (ou des machines énergivores). Ces systèmes pourraient même être installés dans de plus petites localités.
Sources (par ordre chronologique) :
- “Halage”, La Nature, 15 décembre, 1888.
- “Gov. Flower’s trolley plan: he would equip the Erie Canal with electricity”, The New York Times, 10 juin, 1893.
- Electrical boats and navigation, Martin Thomas Commerford, 1894 (ce livre contient beaucoup de détails techniques sur les méthodes utilisées).
- “Electricity on the canals; another scheme for utilizing the trolley system”, The New York Times, 21 janvier, 1894 (tracteurs électriques).
- “Traction mécanique des bateaux sur les canaux”, Mémoires et compte rendu des travaux de la Société des Ingenieurs Civils, 18 janvier, 1895.
- “Trolleyline for Canalboats: contract signed for an experimental system of four miles - how it would be operated”, The New York Times, 26 juillet, 1895.
- “Electricity on the Erie Canal”, The New York Times, 28 septembre, 1895.
- “The Canal Trolley works well: succesful test of the new system of propulsion”, The New York Times, 27 octobre, 1895.
- “Boats run by electricity, how the Lamb system has been found to work on the Erie”, The New York Times, 24 novembre, 1895.
- “Der Elektrische Schiffzug”, Georg Meyer, 1906.
- History of the canal system of the state of New York, Nobel E. Whitford, 1906.
- “Canals and other inland waters”, Bureau du recensement des États-Unis, 1907 ou 1908 (pdf).
- “La traction électrique des bataux sur les canaux”, Mémoires et compte rendu des travaux de la Société des Ingénieurs Civils, Novembre 1908 (de nombreux détails techniques).
- “Un neuvo systema de sirga funicular electrico para barcos”, M.Ed.Imbeaux, 1914 (pdf)
- “Le canal de Bourgogne et son traffic”, A. Desaunais, 1928
- “Electric mule could propel a canal boat system”, the US GenWeb project, July 29, 2004.
- “The canals of England and Wales and their history”, Jeanette Brigss, 2008.
- “Traction mécanique sur les voies navigables”, G. de Frontenay (site internet - vous trouverez de nombreuses photos)
- “Le tunnel de Mauvages”, bordabord.org (de nombreuses photos)
- “The Erie Canal” (site internet).